Abb.: Verhalten des FUG750-1500 beim unbelasteten Herunterfahren
Nächste: Anleitungs-Formate, Nach oben: (dir) [Inhalt]
(Elektronen-Stoß-Scan-Messungen)
09.May.2012 K. Huber, Strahlenzentrum Univ. Gießen
Version 13.Mai.2020
Nächste: Aufgabe der ECF-Programme, Vorige: Top, Nach oben: Top [Inhalt]
Diese Anleitung zu den ECF-Programmen steht in verschiedenen Formaten zur Verfügung. Die entsprechenden Files finden Sie auf dem Servix unter /usr/exp/ex_help oder auf Ihrem Experiment-Account unter $HOME/ex_home/ex_help:
| ecf.txt | Text-Format, kann z.B. mit a2ps in
handlichem Format gedruckt werden. Es fehlen jedoch Bilder und Grafiken. | |
| ecf.dvi | DVI-Format, kann z.B. mit dvips auf
einem Postscript-Drucker gedruckt werden oder mit xdvi auf einem X-Windows
Bildschirm dargestellt werden. | |
| ecf.html | HTML-Format, kann mit jedem HTML-Browser
(z.B. netscape) gelesen werden. | |
| ecf.info | INFO-Format, kann mit dem
GNU-Info-Browser (info -f ecf.info) und GNU-emacs
gelesen werden. Es fehlen jedoch Bilder und Grafiken. | |
| ecf.pdf | PDF-Format, mit dem Acrobat-Reader zu
lesen. |
Nächste: Bedienung der ECF-Programme, Vorige: Anleitungs-Formate, Nach oben: Top [Inhalt]
Die Steuerung einer Scan-Messung durch das ESS-Messprogramm erfolgt durch einen Experiment-Steuer-File (ECFile). Eine ESS-Messung besteht aus einer Serie von Messintervallen, wobei für jedes Messintervall die Kanalnummer, die Mess- und Pausenzeit, die Elektronenenergie usw. über sieben Interfaces im Control-Routing durch den ECFile vorgegeben werden:
Die Anordnung der Interface-Karten im Control-Routing ist durch die in ESS programmierte Anfangsnormierung festgelegt und muss zu dem vom Benutzer zu erstellenden Experiment-Steuer-File passen.
Der Ablauf einer Scan-Messung ist in der Anleitung zum ESS-Programm ausführlich beschrieben.
Nächste: ECF-Programme des EXEIS-Experimentes, Vorige: Aufgabe der ECF-Programme, Nach oben: Top [Inhalt]
Die Programme sind weitgehend selbsterklärend. Die notwendigen Eingaben werden in Dialogform angefordert. Der Dialog ist in einer Hierarchiestruktur aufgebaut, wobei mittels Menülisten von einer Dialogebene in die andere gewechselt werden kann. Für Parametereingaben existieren im Allgemeinen Vorbelegungswerte, die editiert werden können.
— ECF Menüs — | ||
|---|---|---|
| • ECF Top-Menü: | ||
| • ECF Konfigurations-Menü: | ||
Nächste: ECF Konfigurations-Menü, Nach oben: Bedienung der ECF-Programme [Inhalt]
Beim Start des ECF-Programmes wird das Top-Menü übersprungen und gleich die Parametereingabe (Siehe Make ECF File.) aufgerufen. Das Top-Menü steht am Ende für weitere Aufgaben zur Verfügung.
| • Exit ECF: | ||
| • Make ECF File: | ||
| • Delete File: | ||
| • Execute shell command: | ||
| • Set configuration: | ||
| • Help: |
Nächste: Make ECF File, Nach oben: ECF Top-Menü [Inhalt]
Verlassen des Programmes.
Nächste: Delete File, Vorige: Exit ECF, Nach oben: ECF Top-Menü [Inhalt]
Für jeden Scan-Typ ist ein eigener Parametersatz einzugeben, der den
Ablauf der Messung steuert. Unter anderem sind Anzahl der Kanäle,
Anfangs- und Endenergie, Zeitbasis 4.Spektrum
sowie Pausen- und Messzeit anzugeben. Das ECF-Programm erzeugt daraus
den ECFile und berechnet einige Daten, die für die Durchführung
der Messung von Interesse sind:
Duty cycle: Tastverhältnis des Scans
Round trip time: Gesamtzeit eines Scan-Durchlaufes
Pause time: Anteil der Pausenzeit an der Gesamtzeit
Gate time: Anteil der Messzeit an der Gesamtzeit
FUG wait time: Anteil der Wartezeit auf das FUG an der Gesamtzeit
IT sevice time: Anteil der Interrupt-Service-Zeit an der Gesamtzeit
Max time error: der Fehler im (4.) Messzeitspektrum ist abhängig von
der eingestellten Zeitbasis und der Messzeit.
(Siehe ECF-Programme des EXEIS-Experimentes.)
Nächste: Execute shell command, Vorige: Make ECF File, Nach oben: ECF Top-Menü [Inhalt]
Eine existierende ECF-Datei wird gelöscht (auf dem Host-Rechner), die Daten sind verloren.
Nächste: Set configuration, Vorige: Delete File, Nach oben: ECF Top-Menü [Inhalt]
Einige der VxWorks-Shell-Kommandos (cd, ls, pwd, whoami) können ausgeführt werden.
Nächste: Help, Vorige: Execute shell command, Nach oben: ECF Top-Menü [Inhalt]
Führt zum ECF Konfigurations-Menü. (Siehe ECF Konfigurations-Menü.)
Vorige: Set configuration, Nach oben: ECF Top-Menü [Inhalt]
Bringt diese Anleitung über das menüorientierte GNU-INFO-Programm auf den Bildschirm. INFO läuft dabei auf einem Server (z.Z. Servix).
Vorige: ECF Top-Menü, Nach oben: Bedienung der ECF-Programme [Inhalt]
Unter diesem Konfigurations-Menü erfolgen alle notwendigen Anpassungen des Programmes. Beim allerersten Start des Messprogrammes wird dieser Menüpunkt stets automatisch aufgerufen. Danach sollte er nur noch bei Konfigurationsänderungen benutzt werden.
| • Return..: | ||
| • General parameters: | ||
| • Control Routing addresses: | ||
| • FUG and e-Gun parameters: |
Nächste: General parameters, Nach oben: ECF Konfigurations-Menü [Inhalt]
Rückkehr zum Top-Menü.
Nächste: Control Routing addresses, Vorige: Return.., Nach oben: ECF Konfigurations-Menü [Inhalt]
Name of experiment
Dieser Name wird im Header des Spektrums als Experimentname eingetragen.
Print verbose messages
Bei Angabe einer ’1’ werden ausführlichere Meldungen ausgegeben.
Delay messages
Gelegentlich wird eine vorausgehende von einer nachfolgenden Meldung
so rasch überschrieben, dass sie nicht gelesen weren kann. Hier kann
für Meldungen eine Mindestverweilzeit (in Sek.) auf dem Bildschirm
angegeben werden. Dies verzögert natürlich die Bedienung des
Programmes und sollte deshalb nur für Testzwecke eingeschaltet werden.
Check task stack
Unter VxWorks wird der Stack einer Task aus Zeitgründen nicht auf
Überlauf geprüft. Ein Überlauf führt in der Regel jedoch
zur Zerstörung der Task und auch des Systems. Eine ’1’ führt
beim Stop der Task zu einer Prüfung des Stack. Im Allgemeinen nur
bei Problemen notwendig.
Nächste: FUG and e-Gun parameters, Vorige: General parameters, Nach oben: ECF Konfigurations-Menü [Inhalt]
Festlegen der Steckplatz abhängigen Registeradressen für die einzelnen Steuerfunktionen.
Zur Zeit (10.Mai.2012) sind folgende Control-Routing-Adressen aktuell:
0x10 DAC1: Sollwert fein, Bereich 0...256 V 0x11 DAC2: Sollwert grob, Bereich 0...2048 V 0x12 DAC3: FUG750-1500, Bereich 0...1500 V 0x13 Kanalnummer; 16 Bit parallel (20 pol. Stecker) 0x14 Timer Gatezeit 0x15 Timer Pausenzeit 0x16 Zeitbasis 4. Spektrum
Vorige: Control Routing addresses, Nach oben: ECF Konfigurations-Menü [Inhalt]
Diese Parameter beschreiben das Verhalten des FUG750-1500 Netzgerätes bei Spannungsänderungen. Die vorgeschlagenen Werte haben ein brauchbar glattes Fahrverhalten ergeben. (Siehe FUG750-1500.)
Nächste: Obsolete ECF-Programme, Vorige: Bedienung der ECF-Programme, Nach oben: Top [Inhalt]
| • Aufgaben und Funktion: | ||
| • ECFscn Programm: | Standard-Scan | |
| • ECFscd Programm: | Double-Scan | |
| • ECFscl Programm: | Long-Scan |
Nächste: ECFscn Programm, Nach oben: ECF-Programme des EXEIS-Experimentes [Inhalt]
| • Release Notes: | ||
| • Aufgaben: | ||
| • Funktion: | ||
| • Check der Eingaben: | ||
| • Kathodenspannung: | ||
| • FUG750-1500: |
Nächste: Aufgaben, Nach oben: Aufgaben und Funktion [Inhalt]
Start und Ende
Beim Start wird erwartet, dass die aktuelle Elektronenenergie auf
null steht. Am Ende eines Scans wird sie auf null gefahren. Es ist
dringend zu empfehlen bei unbekanntem Vorleben, vor Anschalten der
Hochspannung, mit dem ESW-Programm die Energie auf null zu stellen,
da die DACs Zufallswerte haben könnten, die zu einer Übersteuerung
und Beschädigung des KEPCO führen.
Überläufe der 16-Bit-Zähler
Die Gefahr von Überläufen der 16-Bit-Zähler für Ströme und
Zeittakt besteht nicht mehr, da die Datenübertragung abhängig
vom Zeittakt alle 50 bzw 100ms erfolgt statt nur bei jedem Kanalwechsel.
Dadurch werden beliebig lange Messzeiten pro Kanal möglich.
Nächste: Funktion, Vorige: Release Notes, Nach oben: Aufgaben und Funktion [Inhalt]
Die Steuerung einer Scan-Messung durch das ESS-Messprogramm erfolgt durch einen Experiment-Steuer-File (ECFile). Eine ESS-Messung besteht aus einer Serie von Messintervallen, wobei für jedes Messintervall die Kanalnummer, die Mess- und Pausenzeit, die Elektronenenergie usw. über sieben Interfaces im Control-Routing durch den ECFile vorgegeben werden:
Der Ablauf einer Scan-Messung ist in der Anleitung zum ESS-Programm ausführlich beschrieben.
Nächste: Check der Eingaben, Vorige: Aufgaben, Nach oben: Aufgaben und Funktion [Inhalt]
Beim EXEIS-Experiment wird die Kathodenspannung der Elektronenkanone
als Summe eines langsamen FUG- und eines schnellen KEPCO-Netzgerätes
erzeugt.
Der Sollwert der Kathodenspannung wird durch DAC1 (fein) und
DAC2 (grob) vorgegeben. Die FUG-Spannung wird durch DAC3 eingestellt.
Über eine Rückkopplung mittels Messwiderstand wird das KEPCO
geregelt, um den Sollwert einzustellen. Da das KEPCO
aber nur einen Spannungshub von +-100V besitzt muss
das FUG Netzgerät stets so eingestellt werden, dass das KEPCO
nicht übersteuert.
Die Stangenspannung beträgt -0.3 der Kathodenspannung. Dieses
Verhältnis ist hardwaremäßig fest eingestellt.
Anfangs war geplant, zu Beginn einer Messung das FUG auf einen festen Wert zu programmieren und den Scan in den Grenzen des KEPCO durchzuführen (ECFscn). Inzwischen besteht der Bedarf, einen größeren Energiebereich zu scannen als das KEPCO erlaubt (ECFscl) bzw. zwei getrennte Energiebereiche während einer Messung zu scannen (ECFscd). Dies macht es erforderlich auch das FUG möglichst schnell auf einen passenden Wert zu fahren. Da das FUG für eine solche Aufgabe offensichtlich nicht entwickelt wurde, ist sein Verhalten bei solchen Aktionen recht unfreundlich (Siehe FUG750-1500.).
Nächste: Kathodenspannung, Vorige: Funktion, Nach oben: Aufgaben und Funktion [Inhalt]
| MINE: | min. Elektronen-Energie | |
| MAXE: | max. Elektronen-Energie |
Nächste: FUG750-1500, Vorige: Check der Eingaben, Nach oben: Aufgaben und Funktion [Inhalt]
Spannungseinstellung
Mit den DACs 1 und 2 wird der Sollwert für die Kathodenspannung
vorgegeben. Der Sollwert ergibt sich als die Summe der von DAC 1 (fein)
und 2 (grob) eingestellten Spannungen, d.h. zu maximal 2304 V.
Über die Rückkopplung mittels Messwiderstand versucht das KEPCO den
Sollwert einzustellen. Da das KEPCO aber nur einen Spannungshub von
+-100V besitzt wird das FUG Netzgerät, das die Basisspannung liefert,
mit DAC 3 um +-10V nachgeführt sobald das KEPCO +-5V erreicht
(einstellbar, Siehe FUG750-1500.).
Wartezeiten
Damit die Par/Ser-Wandlung der DAC-Daten vollständig durchgeführt werden
kann, ist eine minimale Zeit zwischen den einzelnen Ausgaben einzuhalten,
die sich aus der Übertragungsrate (DAC1/2: 2.4576MHz, DAC3: 32.768kHz) und
der seriellen Datenlänge (16*8+16=144 Takte) errechnet: DAC1/2: 0.06ms,
DAC3: 4.4ms.
Ferner wird berücksichtigt, dass insbesondere das FUG zum Fahren der
Spannung Zeit benötigt. Die FUG-Bewegungen sind optimiert und Pausen-
und Messzeiten werden bei den FUG-Wartezeiten berücksichtigt.
Nichtlinearitäten
Während für das ECFscn-Programm der Scan alleine über den DAC1
gesteuert werden kann, muss für ECFscl und ECFscd auch der
DAC2-Wert verändert werden. Dies führt zu Sprüngen in der
Linearität des Sollwertes an den Stellen, an denen der DAC2-Wert
sich ändert. Zwei Möglichkeiten bieten sich an:
STEPMODE=0:
Für jeden Kanal werden DAC1 und DAC2 neu berechnet weshalb immer
beide Ungenauigkeiten (10^-5 FSR; DAC1: 2.5mV, DAC2: 20mV) eingehen.
Rechnerisch wird der Sollwert immer exakt erreicht.
STEPMODE=1:
Wie bei den alten Scans wird der DAC2-Wert festgehalten solange der
dynamische Bereich von DAC1 nicht verlassen wird. Damit wird eine
8-fach höhere Genauigkeit innerhalb eines dynamischen Bereichs von
DAC1 erreicht (10^-5 FSR = 2.5mV). Die Übergänge zwischen den
einzelnen Bereichen mit unterschiedlichen DAC2-Werten sind jedoch
mit den 8-fach größeren Fehlern des DAC2 (10^-5 FSR = 20mV)
behaftet.
Auch rechnerisch wird der Sollwert nicht immer erreicht, da
FSR/8 DAC2 = 256V, jedoch nur FSR DAC1 = 255.998V wodurch der
Sollwert innerhalb des dynamischen Bereichs von DAC1 kontinuierlich
von 0 bis -2mV abfällt, da die Kanalbreite auf DAC2 bezogen ist.
Bei einem Bezug auf DAC1 würde dies vermieden, dann würden aber
die nachfolgenden Bereiche jeweils um 2mV höher liegen bis dies
durch einen DAC1-Schritt (3.9mV) wieder korrigiert werden kann.
Für Up- und Down-Scans werden die gleichen DAC2-Werte benutzt.
Zur Zeit ist STEPMODE=1 fest einprogrammiert.
Vorige: Kathodenspannung, Nach oben: Aufgaben und Funktion [Inhalt]
Die Summe von FUG- und KEPCO-Spannung ist die Kathodenspannung. Der Sollwert der Kathodenspannung wird durch DAC1 (fein) und DAC2 (grob) vorgegeben. Die FUG-Spannung wird durch DAC3 eingestellt. Über eine Rückkopplung mittels Messwiderstand wird das KEPCO geregelt, um den Sollwert einzustellen. Da das KEPCO aber nur einen Spannungshub von +-100V besitzt muss das FUG Netzgerät stets so eingestellt werden, dass das KEPCO nicht übersteuert.
Sowohl ECFscd als auch ECFscl erlauben einen ausgedehnten Scan-Bereich der die Grenzen des KEPCO-Gerätes überschreitet, so dass auch das FUG zum Scan beitragen muss. Da dieses jedoch für schnelle Spannungsänderungen offensichtlich nicht gebaut ist, muss mit Extrapausen, abhängig von der Last, der Änderungsrichtung und der aktuellen Spannung, auf das FUG gewartet werden. Ziel war es, die Steuerung des FUG so zu optimieren, dass das KEPCO nicht übersteuert aber auch keine Zeit unnötig verschenkt wird. Mit den folgenden 15 Parametern, die über das Konfigurationsmenü angepasst werden können, ist eine recht brauchbare Einstellung möglich:
Gun current at 1kV 450 [mA]
Strom, den die e-Kanone bei 1kV zieht
FUG max current 500 [mA]
maximaler Strom, den das FUG liefern kann
FUG raw voltage R 108 [kOhm]
FUG raw voltage C 232 [uF]
RC-Werte nach der Gleichrichtung
FUG regul. volt. R 990 [kOhm]
FUG regul. volt. C 3.9 [uF]
RC-Werte nach der Regelung
FUG max FET voltage 200 [V]
Spannungsbegrenzung für den Längstransistor
FUG max step size 10 [V]
Schrittweite, mit der das FUG gefahren wird
FUG speed adjust up 5 [rel.]
Geschwindigkeitsjustierung für das Hochfahren
FUG speed adjust down 5 [rel.]
Geschwindigkeitsjustierung für das Runterfahren
FUG speed limit up 250 [V/s]
Geschwindigkeitsbegrenzung für das Hochfahren
FUG speed limit down 250 [V/s]
Geschwindigkeitsbegrenzung für das Runterfahren
FUG stumbling region low 150 [V]
Untergrenze des 'Stolperbereichs'
FUG stumbling region high 250 [V]
Obergrenze des 'Stolperbereichs'
FUG stumbling speed limit 100 [V/s]
Geschwindigkeitsbegrenzung im 'Stolperbereich'
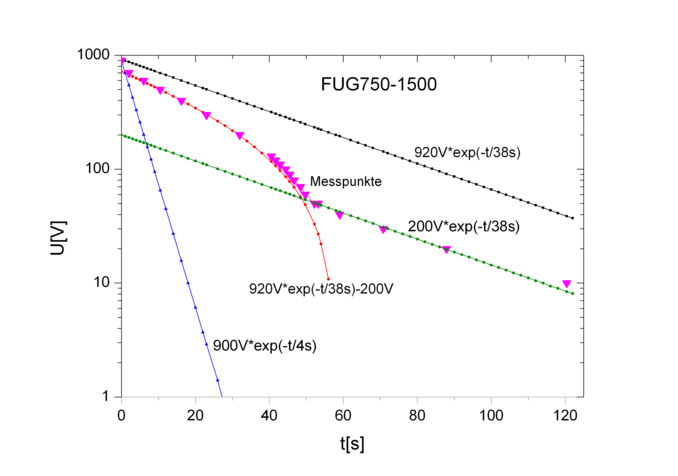
Das Verhalten des FUG wird unter Anderem bestimmt durch je eine RC-Zeit vor und nach der Regelung sowie eine Schutzfunktion für den Längstransistor, die eine Überlastung von diesem verhindert durch Begrenzung des Spannungsabfalls an diesem auf 200V. So geht das Runterfahren (Abb.) zunächst einmal recht flott mit der kleineren RC-Zeit (4s) der geregelten Seite bis die 200V Grenze erreicht ist, um anschließend deutlich langsamer abzufallen mit der RC-Zeit der ungeregelten Seite (38s). Ab 50V wird’s dann rätselhafterweise noch mal deutlich langsamer.
Beim Hochfahren gibt es je nach Vorleben eine ’Stolperstelle’ zwischen 150V und 250V, an der das FUG eine zusätzliche ’Denkpause’ benötigt.
Abb.: Verhalten des FUG750-1500 beim unbelasteten Herunterfahren
Nächste: ECFscd Programm, Vorige: Aufgaben und Funktion, Nach oben: ECF-Programme des EXEIS-Experimentes [Inhalt]
ECFscn ist das ursprüngliche Programm zur Erstellung von ECFiles für Scan-Messungen des EXEIS-Experimentes. Diese Scans beschränken sich auf den dynamischen Bereich des KEPCO-Netzgerätes von +-100V und benötigen nur den DAC1 zur Energie-Sollwerteinstellung. Da das langsame FUG-Netzgerät mit einem konstanten Wert betrieben wird, entfallen notwendige Wartezeiten. Da nur der genauere DAC1 benutzt wird, sind die Nichtlinearitäten bei der Energie/Kanal-Zuordnung geringer (Siehe Kathodenspannung.). Die Messzeiten pro Kanal sind gleich. Zum Überdecken eines größeren Energiebereichs müssen mehrere Messungen aneinandergefügt werden.
Nächste: ECFscl Programm, Vorige: ECFscn Programm, Nach oben: ECF-Programme des EXEIS-Experimentes [Inhalt]
ECFscl ist eine Erweiterung des ECFscn Programmes auf zwei Messbereiche. Ferner sind die beiden Scans nicht mehr an die +-100V Grenzen des KEPKO-Netzgerätes gebunden durch Nachführen des FUG-Netzgerätes. Im Spektrum werden beide Messbereiche aneinander anschließend abgelegt.
Vorige: ECFscd Programm, Nach oben: ECF-Programme des EXEIS-Experimentes [Inhalt]
ECFscl ist eine Erweiterung des ECFscn Programmes. Durch Nachführen des FUG-Netzgerätes sind die Scans nicht mehr an die +-100V Grenzen des KEPKO-Netzgerätes gebunden, so dass der gesamte Energiebereich in einer einzigen Messung erfasst werden kann.
Die starke Abhängigkeit des Elektronenstroms von der Elektronenenergie (E) wird berücksichtigt durch eine Anpassung der Messzeit (T) für die einzelnen Kanäle des Spektrums mit dem freien Parameter T0 für E = 0eV:
T = T0 / (1 + 2000 * (E/[eV])^1.5
Durch diese Formel werden die Messzeiten für hohe Energien möglicherweise sehr kurz. Dies hat zur Folge, dass die im vierten Spektrum akkumulierte Messzeit pro Kanal deutliche Interferenzmuster enthält, wenn für die Zeitbasis eine zu niedrige Frequenz gewählt wurde, da sowohl Zeitbasis als auch Messzeit pro Kanal sich vom gleichen 10 MHz Master-Takt ableiten. Zur Kontrolle wird deshalb nach der Parametereingabe der maximal zu erwartende Fehler im Messzeit-Spektrum errechnet und ausgegeben.
Nächste: ECF-Hilfsprogramme, Vorige: ECF-Programme des EXEIS-Experimentes, Nach oben: Top [Inhalt]
| • ECFaux: | General purpose sweep control | |
| • ECF1h: | High Energy E-gun (SI) | |
| • ECF1l: | Low Energy E-gun (SI) | |
| • ECFef: | Efficiency Runs (2nd Magnet) (SI) | |
| • ECFesa: | ESA22 Scans (ESA22) | |
| • ECFm1: | 1st Magnet-Sweep, mass spectrum (SI) | |
| • ECFm2: | 2nd Magnet-Sweep, signal spectrum (SI) |
Nächste: ECF1h, Nach oben: Obsolete ECF-Programme [Inhalt]
General purpose sweep control
ECFaux.0 General purpose sweep control 13.01.2003 K. Huber Direkte Programmierung der DAC-Ausgabe in Volt
Nächste: ECF1l, Vorige: ECFaux, Nach oben: Obsolete ECF-Programme [Inhalt]
High Energy E-gun (Schwerionenanlage)
ECF1h.2 High Energy E-gun for EX017 experiment
27.04.1994 G. Hofmann
30.03.2000 K. Huber: nach C und ueberarbeitet
Anmerkungen:
1: In der Originalversion (ECF1h.1) wird zur Ermittelung der
Schrittweite der Energiebereich durch die Anzahl der Kanaele
geteilt. Dies hat zur Folge, dass die Endenergie nicht erreicht
wird, z.B.: max = 10, min = 0, 5 Kanaele;
Schrittweite: 10 / 5 = 2 ==> 5 Kanaele: 0, 2, 4, 6, 8
Loesungen alle unbefriedigend:
durch Kanaele-1 teilen ergibt krumme Schrittweiten;
Anzahl der Kanaele um 1 erhoehen ergibt Fragen;
alles so lassen ergibt gerade bei wenig Kanaelen
auch Ueberraschungen. Was nun?
Loesung (11.01.01):
EXEIS arbeitet mit K-1 Kanaelen. Um gemeinsame Auswerte-
Programme verwenden zu koennen deshalb mit dem Start der
VME-Systeme auch fuer EX017 K-1!
2: Funktion der Kanonen-Spannumgsversorgung
----------------------------------------
Mit den DACs 1 und 2 wird ein Sollwert fuer die Kathoden-
spannung vorgegeben. Der Sollwert ergibt sich als die Summe
der von DAC 1 (fein) und 2 (grob) eingestellten Spannungen, d.h.
zu maximal 6809.5 V. Ueber die Rueckkopplung mittels Messwiderstand
versucht das KEPCO den Sollwert einzustellen. Da das KEPCO
aber nur einen Spannungshub von +-100V besitzt muss zunaechst
das aufgestockte FUG Netzgeraet mit DAC 3 in die Naehe des
Sollwertes gestellt werden. Die FUG-Spannung wird dabei so
gewaehlt, dass fuer einen Scan der maximale Spannungshub des KEPCO
zur Verfuegung steht. Die Stangenspannung betraegt -0.3 der
Kathodenspannung. Dieses Verhaeltnis ist hardwaremaessig fest
eingestellt.
Der Startpunkt fuer den Scan wird mit DAC 2 eingestellt und ist nur
auf ein LSB von DAC2 genau. Der Scan wird mit DAC1 durchgefuehrt und
ist relativ 8 mal genauer, absolut jedoch nicht, was fuer die Scan-
Messung OK ist.
3: Check und Anpassung der Eingaben
--------------------------------
MINE: min. Elektronen-Energie
MAXE: max. Elektronen-Energie
Es wird geprueft, ob MINE < MAXE ist.
Der Eingabewert fuer MINE und MAXE ist auf die Hard
Limits der Spannungsversorgungen begrenzt. Das obere Hardlimit
von DAC1 muss so gewaehlt werden, dass noch die fein Einstellung
von MINE durch DAC1 moeglich ist.
Falls fuer MAXE das Soft Limit (Ueberspannungs-Schutz) ueberschritten
wird, gibt's eine Warnung und bei der naechsten Eingabebestaetigung
wird der Wert uebernommen.
MINE wird mittels DAC2 grob und DAC1 fein eingestellt, was aber nur
innerhalb der Aufloesung von DAC1 genau ist. Deshalb wird MINE
rueckgerechnet und bei einer Aenderung mit einer Warnung zur
Bestaetigung wieder ausgegeben. Dies jedoch nur, wenn die Aenderung
nicht durch eine der begrenzenden Genauigkeiten (ENGY_ACCRCY,
FLT_EPSILON) verloren geht.
Aus der Differenz MAXE-MINE werden ganzzahlige Schritte >0 fuer
den DAC1 berechnet, falls noetig durch Anpassung von MAXE und
der Kanalzahl. Wobei Aenderungen stets durch eine nochmaligen Eingabe
bestaetigt werden muessen.
Fuer die gewuenschte Kanalnummer wird unter Beruecksichtigung der
Aufloesung der DACs eine moegliche Startenergie und die zugehoerige
Kanalnummer fuer den Start des anschliessenden Scans errechnet.
Nächste: ECFef, Vorige: ECF1h, Nach oben: Obsolete ECF-Programme [Inhalt]
Low Energy E-gun (Schwerionenanlage)
ECF1l.2 High Current E-gun for EX017 experiment
03.05.1989 G. Hofmann
30.03.2000 K. Huber: nach C und ueberarbeitet
Anmerkungen:
1: In der Originalversion (ECF1l.1) wird zur Ermittelung der
Schrittweite der Energiebereich durch die Anzahl der Kanaele
geteilt. Dies hat zur Folge, dass die Endenergie nicht erreicht
wird, z.B.: max = 10, min = 0, 5 Kanaele;
Schrittweite: 10 / 5 = 2 ==> 5 Kanaele: 0, 2, 4, 6, 8
Loesungen alle unbefriedigend:
durch Kanaele-1 teilen ergibt krumme Schrittweiten;
Anzahl der Kanaele um 1 erhoehen ergibt Fragen;
alles so lassen ergibt gerade bei wenig Kanaelen
auch Ueberraschungen. Was nun?
Loesung (11.01.01):
EXEIS arbeitet mit K-1 Kanaelen. Um gemeinsame Auswerte-
Programme verwenden zu koennen deshalb mit dem Start der
VME-Systeme auch fuer EX017 K-1!
2: Funktion der Kanonen-Spannungsversorgung
----------------------------------------
Mit den DACs 1 und 2 wird ein Sollwert fuer die Kathoden-
spannung vorgegeben. Der Sollwert ergibt sich als die Summe
der von DAC 1 (fein) und 2 (grob) eingestellten Spannungen, d.h.
zu maximal 1280 V. Ueber die Rueckkopplung mittels Messwiderstand
versucht das KEPCO den Sollwert einzustellen. Da das KEPCO
aber nur einen Spannungshub von +-100V besitzt muss zunaechst
das aufgestockte FUG Netzgeraet mit DAC 3 in die Naehe des
Sollwertes gestellt werden. Die FUG-Spannung wird dabei so
gewaehlt, dass fuer einen Scan der maximale Spannungshub des KEPCO
zur Verfuegung steht. Die Stangenspannung betraegt -0.3 der
Kathodenspannung. Dieses Verhaeltnis ist hardwaremaessig fest
eingestellt.
Der Startpunkt fuer den Scan wird mit DAC 2 eingestellt und ist nur
auf ein LSB von DAC2 genau. Der Scan wird mit DAC1 durchgefuehrt und
ist relativ 8 mal genauer, absolut jedoch nicht, was fuer die Scan-
Messung OK ist.
3: Check und Anpassung der Eingaben
--------------------------------
MINE: min. Elektronen-Energie
MAXE: max. Elektronen-Energie
Es wird geprueft, ob MINE < MAXE ist.
Der Eingabewert fuer MINE und MAXE ist auf die Hard
Limits der Spannungsversorgungen begrenzt. Das obere Hardlimit
von DAC1 muss so gewaehlt werden, dass noch die fein Einstellung
von MINE durch DAC1 moeglich ist.
Falls fuer MAXE das Soft Limit (Ueberspannungs-Schutz) ueberschritten
wird, gibt's eine Warnung und bei der naechsten Eingabebestaetigung
wird der Wert uebernommen.
MINE wird mittels DAC2 grob und DAC1 fein eingestellt, was aber nur
innerhalb der Aufloesung von DAC1 genau ist. Deshalb wird MINE
rueckgerechnet und bei einer Aenderung mit einer Warnung zur
Bestaetigung wieder ausgegeben. Dies jedoch nur, wenn die Aenderung
nicht durch eine der begrenzenden Genauigkeiten (ENGY_ACCRCY,
FLT_EPSILON) verloren geht.
Aus der Differenz MAXE-MINE werden ganzzahlige Schritte >0 fuer
den DAC1 berechnet, falls noetig durch Anpassung von MAXE und
der Kanalzahl. Wobei Aenderungen stets durch eine nochmaligen Eingabe
bestaetigt werden muessen.
Fuer die gewuenschte Kanalnummer wird unter Beruecksichtigung der
Aufloesung der DACs eine moegliche Startenergie und die zugehoerige
Kanalnummer fuer den Start des anschliessenden Scans errechnet.
Nächste: ECFesa, Vorige: ECF1l, Nach oben: Obsolete ECF-Programme [Inhalt]
Efficiency Runs, 2nd Magnet (Schwerionenanlage)
For a given number of loops the 2nd Magnet is switched between two B-fields. On each point of B-field a given number of measuments is done. 20.10,1988 K. Huber 13.08.1998 D. Hathiramani 30.03.2000 K. Huber: nach C und ueberarbeitet
Nächste: ECFm1, Vorige: ECFef, Nach oben: Obsolete ECF-Programme [Inhalt]
ESA22 Scans (Elektronenspektrometer); inzwischen in ESA22S integriert
Nächste: ECFm2, Vorige: ECFesa, Nach oben: Obsolete ECF-Programme [Inhalt]
1st Magnet-Sweep, mass spectrum (Schwerionenanlage)
ECFm1.0 Sweep of 1st Magnet (mass spectrum)
20.10.1988 K. Huber
02.06.1992 G. Hofmann
01.07.1992 M. Stenke
Anpassungen an Netzgeraete:
03.08.1992 G. Hofmann: Tekelek-Netzgeraet
04.11.1997 D. Hathiramani: NG-30V100A (seriell)
17.02.1998 D. Hathiramani: FUG-400A/25V (parallel)
24.02.1998 D. Hathiramani: 'Gruenes' 500A/50V (parallel)
22.05.1998 D. Hathiramani: Heinzinger 250A/100V (seriell)
23.11.2000 F. Scheuermann: Heinzinger 250A/100V ((parallel)
30.03.2000 K. Huber: nach C und ueberarbeitet
Anmerkungen:
1: In der Originalversion (ECFm1.0) wird das Magnetfeld zur Aufnahme
der Massenspektren nicht linear gefahren sondern die DAC
Spannung. Die DAC Schritte sind aequidistand. Der Endwert fuer
das Magnetfeld und die Kanalzahl werden angepasst. Dies fuehrt
zu Aufloesungsunterschieden [Gauss/channel] bis zum Faktor 2.5.
Diese neue Version (ECFm1.1) faehrt das Magnetfeld linear. Es werden
jedoch durch die Umrechnung und Rundung in die Integer-DAC-Werte
Aufloesungsfehler von +-.5 DAC-Einheiten gemacht.
Die Originalversion ist als Info noch erhalten (OLDVERSION).
2: In der Originalversion (ECFm1.0) wird zur Ermittelung der
Schrittweite der Magnetfeldbereich durch die Anzahl der Kanaele
geteilt. Dies hat zur Folge, dass das Endmagnetfeld nicht erreicht
wird, z.B.: max = 10, min = 0, 5 Kanaele;
Schrittweite: 10 / 5 = 2 ==> 5 Kanaele: 0, 2, 4, 6, 8
Loesungen alle unbefriedigend:
durch Kanaele+1 teilen ergibt krumme Schrittweiten;
Anzahl der Kanaele um 1 erhoehen ergibt Fragen;
alles so lassen ergibt gerade bei wenig Kanaelen
auch Ueberraschungen. Was nun?
Vorige: ECFm1, Nach oben: Obsolete ECF-Programme [Inhalt]
2nd Magnet-Sweep, signal spectrum (Schwerionenanlage)
ECFm2.0 Sweep of 2nd Magnet (signal spectrum)
20.10,1988 K. Huber
02.06.1992 G. Hofmann
Neue Kalibrierung der Magnetsteuerung 11.11.97 D.Hathiramani
Anpassung auf FUG-400A/25V Netzgeraet 18.02.98 D.Hathiramani
Anpassung auf Tekelec NG30V/100A 24.11.2000 F.Scheuermann
30.03.2000 K. Huber: nach C und ueberarbeitet
Anmerkungen:
1: In der Originalversion (ECFm2.0) wird das Magnetfeld zur Aufnahme
der Massenspektren nicht linear gefahren sondern die DAC
Spannung. Die DAC Schritte sind aequidistand. Der Endwert fuer
das Magnetfeld und die Kanalzahl werden angepasst. Dies fuehrt
zu Aufloesungsunterschieden [Gauss/channel] bis zum Faktor 2.5.
Diese neue Version (ECFm2.1) faehrt das Magnetfeld linear. Es werden
jedoch durch die Umrechnung und Rundung in die Integer-DAC-Werte
Aufloesungsfehler von +-.5 DAC-Einheiten gemacht.
Die Originalversion ist als Info noch erhalten (OLDVERSION).
2: In der Originalversion (ECFm2.0) wird zur Ermittelung der
Schrittweite der Magnetfeldbereich durch die Anzahl der Kanaele
geteilt. Dies hat zur Folge, dass das Endmagnetfeld nicht erreicht
wird, z.B.: max = 10, min = 0, 5 Kanaele;
Schrittweite: 10 / 5 = 2 ==> 5 Kanaele: 0, 2, 4, 6, 8
Loesungen alle unbefriedigend:
durch Kanaele+1 teilen ergibt krumme Schrittweiten;
Anzahl der Kanaele um 1 erhoehen ergibt Fragen;
alles so lassen ergibt gerade bei wenig Kanaelen
auch Ueberraschungen. Was nun?
Nächste: Experiment-Control-File, Vorige: Obsolete ECF-Programme, Nach oben: Top [Inhalt]
| • ECFshow: | Zeigt ECFile-Daten am Bildschirm | |
| • ECFtst: | Tests mit dem Control Routing Test Board |
Nächste: ECFtst, Nach oben: ECF-Hilfsprogramme [Inhalt]
ECFshow prüft ECFiles auf formale Fehler und stellt deren Daten zur Kontrolle auf dem Bildschirm dar.
Vorige: ECFshow, Nach oben: ECF-Hilfsprogramme [Inhalt]
ECFtst spricht das Control Routing Test Board an. Es erzeugt mit Hilfe des Test Boards in einer Schleife eine vorgebbare Anzahl von Interrupts mit vorgebbaren Pausen. Nach jedem Schleifendurchlauf kann eine zusätzliche Pausenzeit angegeben werden. ECFtst dient z.B. der Untersuchung des Interrupt-Verhaltens des Systems. ECFtst verwendet einen speziellen ECF-Modus (Siehe ECF-Steuer-Bytes.).
Nächste: ESS-Header, Vorige: ECF-Hilfsprogramme, Nach oben: Top [Inhalt]
Für jede ESS-Messung muss ein Experiment-Control-File existieren, in dem gleichen Verzeichnis wie das zu messende Spektrum und mit dem gleichen Namen, jedoch mit der File-Extension .ecf .
z. B. Spektrum: ssss.xxx Kontroll-File: ssss.ecf
| • ECF-Header: | ||
| • ECF-Steuer-Bytes: |
Nächste: ECF-Steuer-Bytes, Nach oben: Experiment-Control-File [Inhalt]
Der EC-File besitzt wie ein Spektrum einen Header-Block am Anfang (1024 Bytes). Im Standardteil des Headers wird folgende Parameterbelegung erwartet:
Param. 2 Header-Länge: 2 4 Programm-Identif.: ECFn (n=1,2,3,...: ECF-Klasse) 13 Bytes/Channel: 1
Anschliessend an den Standardteil des Headers folgt je nach ECF-Klasse noch ein spezieller Parametersatz:
ECF1-Header
char guntyp[4]; /* Gun type number */ char commnt[32]; /* Comment for gun type */ char length[16]; /* Length of data set (bytes) */ char ecftyp[16]; /* ECF type */ char chans[16]; /* Number of channels spectrum */ char mine[16]; /* Min. energy */ char maxe[16]; /* Max. energy */ char sttime[16]; /* Startup waiting time */ char offtime[16]; /* Pause time */ char ontime[16]; /* Run time */ char txtptr[8]; /* Position of text for ecfshow */ char showtxt[512]; /* Text for ecfshow program */
ECF2-Header
char guntyp[4]; /* Gun type number */ char commnt[32]; /* Comment for gun type */ char length[16]; /* Length of data set (bytes) */ char ecftyp[16]; /* ECF type */ char chans1[16],chans2[16]; /* Number of channels spectrum */ char mine1[16],mine2[16]; /* Min. energy */ char maxe1[16],maxe2[16]; /* Max. energy */ char sttime1[16],sttime2[16]; /* Startup waiting time */ char offtime1[16],offtime2[16]; /* Pause time */ char ontime1[16],ontime2[16]; /* Run time */ char timbase[8]; /* Time base */ char txtptr[8]; /* Position of text for ecfshow */ char showtxt[512]; /* Text for ecfshow program */
ECF3-Header
char guntyp[4]; /* Gun type number */ char commnt[32]; /* Comment for gun type */ char length[16]; /* Length of data set (bytes) */ char ecftyp[16]; /* ECF type */ char chans[16]; /* Number of channels spectrum */ char mine[16]; /* Min. energy */ char maxe[16]; /* Max. energy */ char sttime[16]; /* Startup waiting time */ char offtime[16]; /* Pause time */ char ontime[16]; /* Run time */ char timbase[8]; /* Time base */ char txtptr[8]; /* Position of text for ecfshow */ char showtxt[512]; /* Text for ecfshow program */
Vorige: ECF-Header, Nach oben: Experiment-Control-File [Inhalt]
Adress-Block
Die Steuerdaten beginnen nach dem Header-Block mit der Definition aller
anzusprechenden Control-Routing-Adressen. Das erste Byte enthält
in den ersten beiden Bits eine Modus-Information und anschließend
die Anzahl der folgenden Interface-Adressen und die folgenden Bytes
enthalten die Interface-Adressen selber.
Byte 0: mmnnnnnn
Modus mm:
0 Es werden immer alle Adressen ausgegeben, in den Scan-Blocks
müssen nur die Änderungen enthalten sein.
1 Spezieller Modus für Tests mit dem Control Routing Test Board.
2 Es werden nur die in den Scan-Blocks enthaltenen Daten ausgegeben.
3 unbenutzt
Beispiel für Modus 0 2 /* Length of address list */ 0x40 /* Address timer modul */ 0x41 /* Address interrupt modul */
Startup-Blocks
Danach folgen die Startup-Blocks, mit denen alle Parameter nach und nach
auf ihren Anfangswert gesetzt werden können. Ein solcher Parametersatz beginnt mit der Anzahl der zu verändernden Parameter (1 Byte), dann der Position 0,1,...
des ersten Parameters in der zu Beginn definierten Adressenliste (1 Byte) und dann
den auszugebenden Parameterwert (2 Bytes, mit dem low Byte zuerst). Die
Anfangsnormierung muss mit dem Steuer-Byte 0xf1 abgeschlossen werden, wenn
mehr als ein Startup-Block benötigt wird. Mindestens ein Startup-Block muss
vorhanden sein.
Beispiel Anfangsnormierung 2 /* Number of commands */ 0 /* Position in address list */ 0xFA /* }(low byte) Timer=.5ms */ 0x01 /* }(high byte) */ 1 /* Position in address list */ 0xA5 /* }(low byte) Test */ 0xA5 /* }(high byte) */ 0xf1 /* End of Startup */
Scan-Blocks
Anschließend folgt für jedes Messintervall ein Parametersatz, der nur alle
zu verändernden Parameter enthalten braucht, jedoch mindestens einen Parameter.
Je nach Modus werden an das Experiment immer alle zu Beginn definierten Parameter
ausgegeben (Modus 0, 1) oder nur die im Scan-Block enthaltenen (Modus 2).
Der Aufbau ist der gleiche wie bei den Startup-Blocks.
1. Messintervall 1 /* Number of commands */ 0 /* Position in address list */ 0xFA /* }(low byte) Timer=.5ms */ 0x01 /* }(high byte) */ 2. Messintervall 1 /* Number of commands */ 0 /* Position in address list */ 0xFA /* }(low byte) Timer=.5ms */ 0x01 /* }(high byte) */
Die Folge der Scan-Blocks muss mit einem der folgenden Steuer-Bytes enden:
Modus 0, 1:
0x00 /* End of ECFile, loop to first Scan-Block or stop */
Es wird ein neuer Scan-Durchlauf gestartet oder
wenn im vorherigen Durchlauf die Messung gestoppt
wurde dann wird sie an dieser Stelle beendet.
0xff /* Stop Scan */
Die Messung wird beendet und die Meldung 'Experiment stopped
by EC-File' ausgegeben.
Modus 2:
0xf2 /* Loop to first Scan-Block or start Cooldown */
Es wird ein neuer Scan-Durchlauf gestartet oder
wenn im vorherigen Durchlauf die Messung gestoppt
wurde dann wird das nachfolgende Cooldown durchgefürt.
0xff /* Stop Scan */
Die Messung wird beendet und die Meldung 'Experiment stopped
by EC-File' ausgegeben.
Cooldown-Blocks
Mit dem Cooldown kann das Experiment auf einen Ruhepunkt gefahren werden.
Der Aufbau der Cooldown-Blocks ist der gleiche wie bei den Scan-Blocks.
Die Folge der Cooldown-Blocks muss mit einem der folgenden Steuer-Bytes
enden:
Modus 0, 1: kein Cooldown möglich!
Modus 2:
0x00 /* End of ECFile, stop */
Die Messung wird beendet.
0xff /* Stop Scan */
Die Messung wird beendet und die Meldung 'Experiment stopped
by EC-File' ausgegeben.
Ein EC-File muss mindestens eine Adressendefinition, eine Anfangsnormierung und ein Messintervall enthalten.
Die EC-Files werden vor der Ausführung vom ESS-Messprogramm auf formale Fehler geprüft.
Spezielle Kommandos Modus 1
0x80 0xtt /* Delay for tests [0xtt*10ms] */ 0x81 0xaa /* Read test board address 0xaa */
Vorige: Experiment-Control-File, Nach oben: Top [Inhalt]
Die ESS-Messdaten-Files entsprechen dem Strahlenzentrumsstandard und können deshalb mit einer Anzahl vorhandener Programme weiterverarbeitet werden. Sie beginnen mit einem Header von 512 Bytes Länge, der am Anfang einen standardisierten Teil enthält und anschließend noch eine Reihe weiterer Daten zur Beschreibung und Auswertung des Experimentes.
Struktur der Header Daten:
Plattformabhängige Definitionen:
UINT2: 2 Bytes "unsigned int"
UINT4: 4 Bytes "unsigned int"
REAL4: 4 Bytes "float"
typedef union {
struct {
struct {
char idhdr[8]; /* Identification of header: "STRZ-VXW" */
char hdlen[1]; /* Length of header: "1" */
char expmnt[6]; /* Experiment */
char idprg[8]; /* ID of generating Program: "ESS " */
char stdat[9]; /* Date of start */
char sttim[8]; /* Time of start */
char spdat[9]; /* Date of stop */
char sptim[8]; /* Time of stop */
char spenam[8]; /* Name of spectrum */
char sptype[4]; /* Type of spectrum: "MCA2" */
char rows[6]; /* Number of rows: " 4" */
char cols[6]; /* Channels/row: " <var>" */
char bytes[1]; /* Bytes/channel: "4" */
char hdfree[4]; /* First free byte in header (0,...) */
char resrv[38]; /* Reserved */
char ltxt[4]; /* Length of text: "80" */
char text[80]; /* Text */
} stddat; /* Standard data of header */
struct {
UINT2 status; /* Status of spectrum */
UINT4 rltcnt; /* Realtime */
UINT4 lftcnt; /* Lifetime */
UINT4 datcnt; /* Processed positions */
UINT4 outcnt; /* Positions out of range */
UINT4 ct1cnt; /* Counter 1 */
UINT4 ct2cnt; /* Counter 2 */
UINT4 ct3cnt; /* Counter 3 */
UINT4 ct4cnt; /* Counter 4 */
UINT4 seqcnt; /* Sequence errors */
UINT4 bovcnt; /* Buffer overruns */
UINT4 rejcnt; /* Rejected data */
UINT4 errcnt; /* Error counter */
UINT4 fulcnt; /* Fifo full counter */
UINT4 hdatid; /* Data identification */
UINT2 staplo; /* Status of plot */
UINT2 slen; /* Length of single spectrum */
REAL4 expar[14]; /* Extended ESS parameters */
char ecfprg[12]; /* Version of ECF program */
UINT2 guntyp; /* Gun type */
char guntxt[32]; /* Gun type comment */
REAL4 gunpar[10]; /* Gun parameters */
REAL4 deadtm; /* Deadtime of event counter [10^-6s] */
REAL4 dtmerr; /* Error deadtime of event counter [10^-6s] */
UINT4 runtim; /* Realtime to run experiment [s] */
REAL4 expar2[20]; /* Extended ESS parameters 2 */
} spcdat; /* Special data of header */
} hdata; /* Header data */
struct {
char h512[512]; /* Fill 512 bytes block */
} htotal; /* Total header */
} HEADER;
ESS übernimmt aus dem Header des ECFiles die speziellen Daten des Scans und macht sie für die Auswertung zugänglich indem es sie in die Parameter expar[] und expar2[] des ESS-Headers übeträgt. Es existieren zur Zeit drei Klassen von Scans: ECF1 - ECF3, die sich in der Belegung des Feldes expar2[] unterscheiden. Weitere Klassen könnten, falls erforderlich, hinzukommen.
ECF-Klassen:
Für die Auswertung sollten die Klassen ECF1 und ECF3 sich
nicht unterscheiden. Der Unterschied besteht im Wesentlichen
darin, dass in Klasse ECF1 die Zeitbasis fest auf 1 (=500kHz)
gesetzt wird, während in den Klassen ECF2 und ECF3 die Zeitbasis
bei der Generierung des ECFiles anzugeben ist.
| Klasse | ECF-Programme | |
|---|---|---|
| ECF1 | ECFscn.4, ECFscd ohne expar2[], Oldies | |
| ECF2 | ECFscd.2 | |
| ECF3 | ECFscn.5, ECFscl, ECFscl.2 |
Experiment-Parameter:
Einige Parameter sind in mehreren Feldelement zu finden
um mit älteren Versionen verträglich zu sein.
- Feldelement unbelegt x Feldelement belegt 0 Feldelement mit 0 belegt
| ECF1 | ECF2 | ECF3 | |||
|---|---|---|---|---|---|
| expar[0] | x | x | x | Min. energy 1 [eV] | |
| expar[1] | x | x | x | Max. energy 1 [eV] | |
| expar[2] | x | x | x | Ion Charge [q] | |
| expar[3] | x | x | x | Ion mass [amu] | |
| expar[4] | x | x | x | Ion energy [keV] | |
| expar[5] | x | x | x | Efficiency [%] | |
| expar[6] | x | x | x | Time base spectrum 4 | |
| expar[7] | x | x | x | El. curr. conv. range | |
| expar[8] | x | x | x | El. curr. conv. FS. const. | |
| expar[9] | x | x | x | Ion curr. conv. range | |
| expar[10] | x | x | x | Ion curr. conv. FS. const. | |
| expar[11] | x | x | x | Startup time 1 [s] | |
| expar[12] | x | x | x | Pause time 1 [ms] | |
| expar[13] | x | x | x | Gate time 1 [ms] | |
| expar2[0] | - | x | x | Number of channels 1 | |
| expar2[1] | - | x | 0 | Number of channels 2 | |
| expar2[2] | - | x | x | Min. energy 1 [eV] | |
| expar2[3] | - | x | 0 | Min. energy 2 [eV] | |
| expar2[4] | - | x | x | Max. energy 1 [eV] | |
| expar2[5] | - | x | 0 | Max. energy 2 [eV] | |
| expar2[6] | - | x | x | Startup time 1 [s] | |
| expar2[7] | - | x | 0 | Startup time 2 [s] | |
| expar2[8] | - | x | x | Pause time 1 [ms] | |
| expar2[9] | - | x | 0 | Pause time 2 [ms] | |
| expar2[10] | - | x | x | Gate time 1 [ms] | |
| expar2[11] | - | x | 0 | Gate time 2 [ms] |