(Koinzidenz-List-Mode-Messungen mit dem ESA22-Elektronen-Spektrometer)
14.Mai.2007 K. Huber, Strahlenzentrum Univ. Gießen Version 03.Feb.2009
Diese Anleitung zum ESA22c-Messprogramm steht in verschiedenen Formaten zur Verfügung. Die entsprechenden Files finden Sie auf dem Servix unter /usr/exp/ex_help oder auf Ihrem Experiment-Account unter $HOME/ex_home/ex_help:
| esa22c.txt | Text-Format, kann z.B. mit a2ps in
handlichem Format gedruckt werden. Es fehlen jedoch Bilder und Grafiken.
| |
| esa22c.dvi | DVI-Format, kann z.B. mit dvips auf
einem Postscript-Drucker gedruckt werden oder mit xdvi auf einem X-Windows
Bildschirm dargestellt werden.
| |
| esa22c.html | HTML-Format, kann mit jedem HTML-Browser
(z.B. netscape) gelesen werden.
| |
| esa22c.info | INFO-Format, kann mit dem
GNU-Info-Browser (info -f esa22c.info) und GNU-emacs
gelesen werden. Es fehlen jedoch Bilder und Grafiken.
| |
| esa22c.pdf | PDF-Format, mit dem Acrobat-Reader zu
lesen.
|
Für das ESA22-Elektronen-Spektrometer existieren folgende Datenerfassungs- und
Auswerteprogramme:
| ESA22m | Messung einer Position-Computer-Matrix
| |
| ESA22s | Messung von Energie-Scans mit Channelplate
| |
| ESA22xs | Messung von Energie-Scans mit Channeltrons
| |
| ESA22t | Messung eines Koinzidenz-Zeit-Spektrums
| |
| ESA22c | Messung von Koinzidenz-List-Mode Daten
| |
| ESA22f | Messung von Formfaktor-Spektren
| |
| ESA22a | Auswertung von ESA22c List-Mode Daten
|
Das ESA22c-Messprogramm ermöglicht die Ermittelung von zusammengehörigen Reaktionsprodukten der sich kreuzenden Elektronen- und Ionenstrahlen. Es fasst die Funktionen der Messprogramme ESA22s und ESA22t zusammen. Die Elektronen werden ortsempfindlich mit einem Channelplate und einem nachfolgenden SSL-2401 Position Computer verarbeitet. Die Ionen werden mit einem Channeltron aufgefangen. Die Laufzeitunterschiede zwischen Elektronen und Ionen werden mittels TPC und ADC zu einem Zeitspektrum verarbeitet, in dem zusammengehörige Paare zu einem Koinzidenz-Peak akkumulieren.
Da die anfallenden 3-dimensionalen Spektren (x*y*t=256*256*n*4Bytes) den Rahmen eines Arbeitsspeichers sprengen, werden die Daten in 'List-Mode-Form', d.h. im Wesentlichen unbearbeitet, über das Netz zum Host-Rechner übertragen. Um vorrübergehende Engpässe bei der Übertragung ausgleichen zu können, verwendet das ESA22c-Programm den freien Arbeitsspeicher als Puffer. Dieser kann bei kurzzeitigen Messungen auch dazu verwendet werden, Datenraten zu verarbeiten, die größer sind als die Transferrate zum Host-Rechner. Darüber hinaus werden zur Online-Kontrolle die x-y-Daten des Position Computers zu einer Ortsmatrix und die Laufzeit-Daten zu einem Zeitspektrum akkumuliert.
Wie beim ESA22s-Programm wird eine Folge von äquidistante Energieschritte durchlaufen. Die Abfolge der Energieschritte ist wahlweise steigend, fallend oder steigend und fallend. Diese Zyklen werden solange wiederholt bis die Messung manuell gestoppt wird. Der letzte Zyklus wird dabei noch zu Ende geführt.
Die Hard- und Software Voraussetzungen sind:
Die maximale mittlere List-Mode-Übertragungsrate liegt je nach VME- und Host-Rechner bei 100-200 kBytes. Bei niedrigen Datenraten wird alle 10s zum Leeren der Puffer eine Close-Open-Sequenz durchgeführt, um auf dem Host-Rechner die Daten zu aktualisieren.
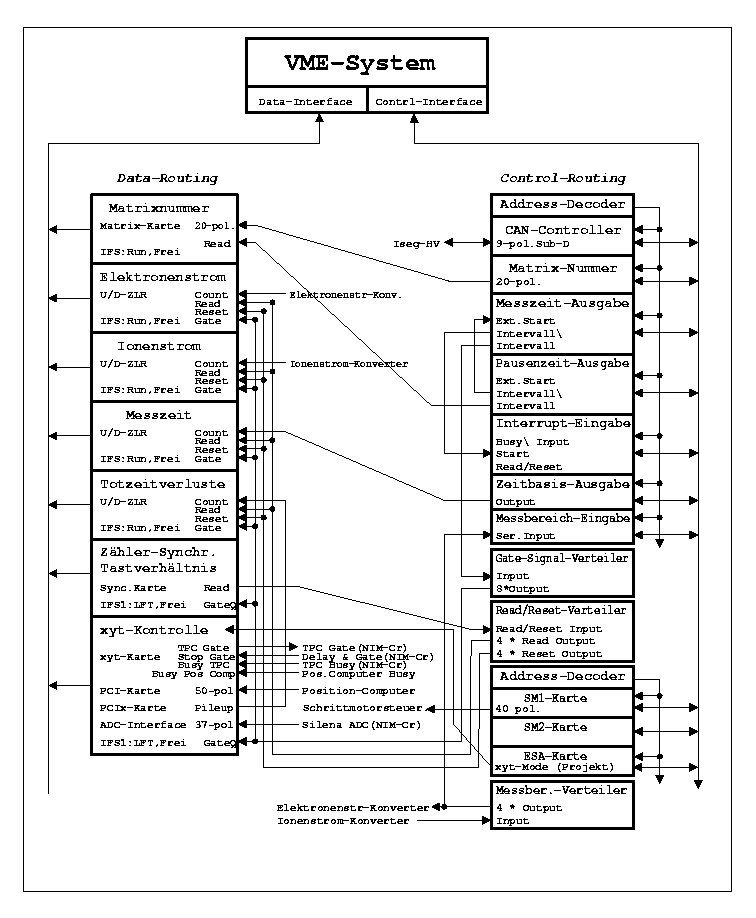
Die Erfassung der Messdaten erfolgt über neun Interfaces im Data-Routing:
Die Steuerung des Experimentes erfolgt über acht Interfaces im Control-Routing, die von zwei Adress-Decodern gesteuert werden:
Zu Beginn der Messung erfolgt durch ESA22c eine Anfangsnormierung über die Interfaces im Control-Routing:
Der Ablauf des Experimentes besteht aus einer Serie von Messintervallen, wobei für jedes Messintervall die Matrixnummer, die Mess- und Pausenzeit, die Spektrometerenergie usw. vorgegeben werden durch einen (internen) Experiment-Steuer-File.
Die Spektrometerenergie wird mit Hilfe des Parameter-Files ~/ex_home/ex_param/esa22.par in Spektrometerspannungen umgerechnet und diese über den CAN-Bus auf dem Iseg-Hochspannungsmodul eingestellt:
Als nächstes wird die aktuelle Matrixnummer zum Positions-Interface im Control-Routing ausgegeben. Anschließend wird der Messzeit-Timer geladen und zum Schluss der Pausen-Timer geladen und gestartet. Das Ende der Pause startet unmittelbar die Messzeit. Im Data-Routing wird, ausgelöst durch das Pausen-Intervall-Signal, zuerst die Matrixnummer zum Rechner übertragen.
Während des Messzeit-Intervalls werden die Positionsdaten des Position-Computers und die Zeitdaten von TPC/ADC zum Rechner übertragen und die vier Zähler akkumulieren die ankommenden Zählimpulse. Der Totzeitzähler summiert die Pileup-Impulse des Position-Computer-Interfaces. Ionen- und Elektronenstrom werden integriert durch Zählen der Ausgangsimpulse von Spannungs-Frequenzwandlern. Die Messzeit wird ermittelt durch Zählen eines Zeittaktes, der durch die programmierbare Zeitbasis im Control-Routing erzeugt wird.
Die vier Zähler und das zugehörige Synchron-Signal werden periodisch mit einem 100ms Takt ausgelesen (Read-Signal) und anschließend gelöscht (Reset-Signal). Mit dem Read-Signal werden die Zählerinhalte in je ein Senderegister übertragen, so dass die Interfaces anschließend sofort wieder frei sind, während die Übertragung der Daten einige Zeit in Anspruch nehmen kann.
Das Synchronsignal trennt die einzelnen Zähler-Datensätze und muss deshalb als erstes übertragen werden. Damit dies gewährleistet ist, wird es vom Data-Routing im Vorrangmodus behandelt. Mit Hilfe des Synchronsignals werden Datenverluste erkannt. Ein unvollständiger Datensatz wird verworfen. Wird ein Zähler mehrfach übertragen, so werden die zuviel übertragenen Daten verworfen, und nur das erste Datum wird verarbeitet, falls ein vollständiger Datensatz zustande kommt. Jeder solcher Fehler erhöht den 'Counters sequence errors'-Zähler um eins. Bei Auftreten von 'Sequence errors' sollte man den Zählerdaten nicht mehr vertrauen.
Damit die Zählerdaten der einzelnen Messintervalle sauber getrennt werden, muss die Pause mindestens 100ms lang sein. Werden die internen Einschwingzeiten für das Iseg8210n verwendet, so ist diese Bedingung auf jeden Fall erfüllt.
Am Ende der Messzeit wird ein Interrupt erzeugt, der dem Messprogramm mitteilt, dass der nächste Zyklus mit der Ausgabe des nächsten Steuerparametersatzes erfolgen kann.
Die Lifetime-Messung erfolgt über die IFS1-Karte des XYT-Interfaces. Sie muss per Steckbrücke so konfiguriert werden, dass sie bei der Lifetime-Messung das GateQ-Signal berücksichtigt.
Das Messzeit/Pause-Verhältnisses (duty cycle) wird über die IFS1-Karte des Zähler-Synchron-Signals gemessen, der das Messzeit-Intervall als GateQ-Signal zur Lifetime-Messung zugeführt wird. Die IFS1-Karte muss per Steckbrücke so konfiguriert werden, dass sie bei der Lifetime-Messung das GateQ-Signal berücksichtigt. Damit die Messung nicht verfälscht wird, darf die Zähler-Synchron-Karte kein Busy-Signal an die IFS1-Karte abgeben.
Abb 1. ESA22c-Timing
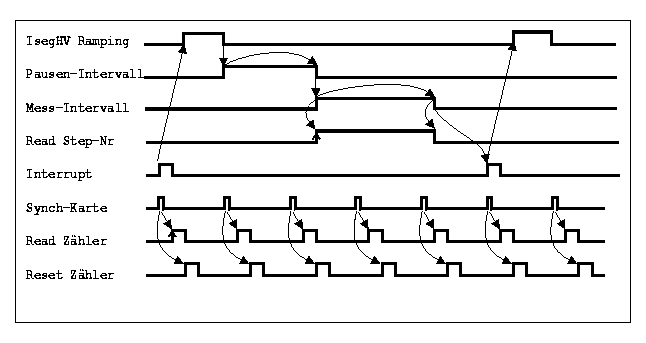
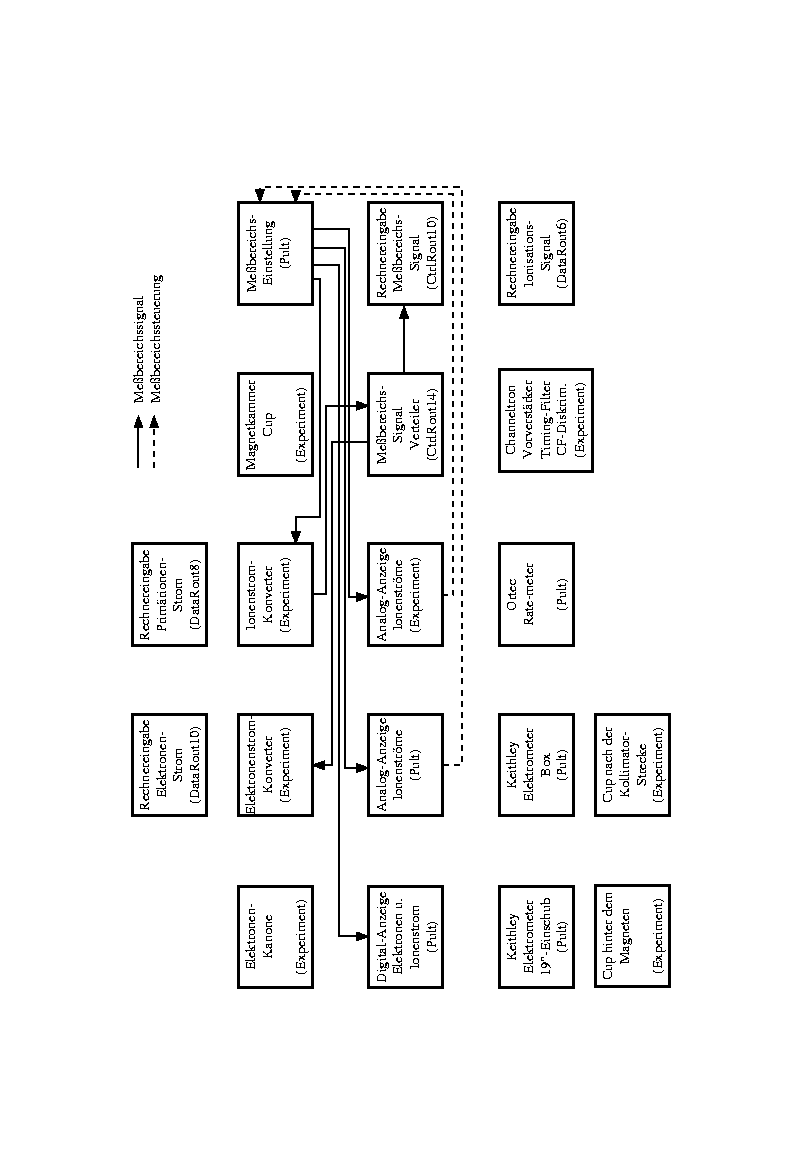
Abb 2. ESA22 Steuerung und Datenerfassung
Elektronen- und Ionenstrom werden in Keithly-Elektrometern gemessen. Die analoge Ausgangsspannung der Keithlys (Vollausschlag: 1V) wird in je einem VFC in eine Frequenz gewandelt (1V ==> 500kHz) und über eine Zähler-Karte gezählt. Die Zählerinhalte werden alle 0.1 Sekunde zum Rechner übertragen und anschließend werden die Zähler gelöscht. Beim Auslesen und Löschen der Zähler entsteht eine Totzeit kleiner 500ns.
Abb 3. Elektronen- und Ionenstrommessung (Planung)
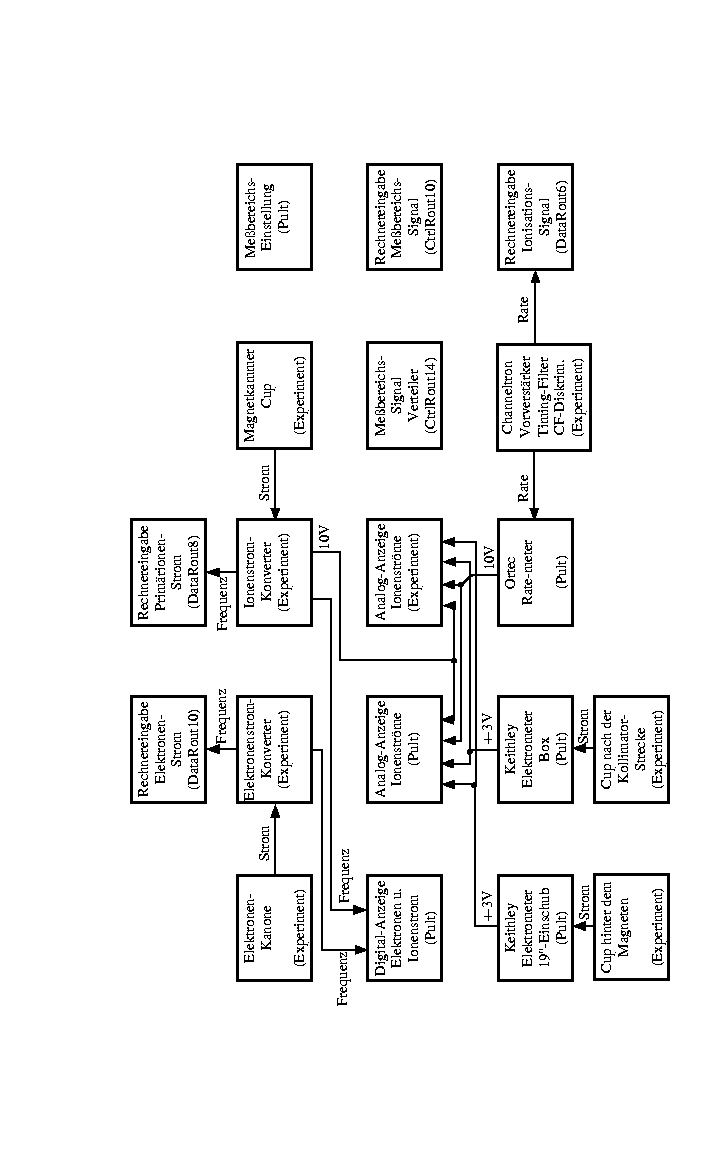
Abb 4. Messbereichssteuerung für Elektronen- und Ionenstrommessung (Planung)
Die Elektronen werden ortsempfindlich mit einem Channelplate und einem nachfolgenden SSL-2401 Position Computer verarbeitet. Dieser liefert je 8 Positions-Bits für X und Y an das PCI-Interface, das ein Datenwort (2*8 Bits) bis zur Übertragung an den Rechner zwischenspeichert.
Werden innerhalb der Totzeit des PCI-Interfaces (im Mittel ca. 4us) vom Position Computer weitere Daten angeliefert, so werden diese verworfen, und über den BNC-Ausgang 'Pile-up out' der PCIx-Karte ein Zählimpuls (TTL) abgegeben, der dem Totzeitverlustzähler zugeführt wird. Die Übergänge des PCI-Interfaces in den Zustand 'Busy' und umgekehrt sind mit ca. 10ns unscharf. Dies führt dazu, dass ein Ereignis, das in diese Übergangszeit fällt, sowohl zum Rechner als auch zum Pile-up-Zähler oder zu keinem von beiden übertragen werden kann. Beim Übergang in den Zustand 'Busy' gibt es jedoch solche Ereignisse nicht, da dann auch der Position Computer busy ist. Das Zählen der Pile-ups ist deshalb etwa mit dem folgenden Fehler behaftet:
F= 10ns * N * R N= Anzahl der verarbeiteten Ereignisse R= Rate der eintreffenden Ereignisse Für die maximal zu verarbeitende Rate (100kHz) ergibt sich daraus: F/N= 10ns * 100kHz = 0.1%
Der Zähler benötigt einen Auslese- und Clear-Impuls (TTL, ca. 10Hz, ca. 100ns) zum periodischen Auslesen und Rücksetzen. Da der Zähler während des Reset-Signals für ankommende Impulse gesperrt ist, erfolgt die Totzeitverlust-Zählung in der Größenordnung 100ns * 10Hz = 1.E-6 zu klein.
Der Position Computer Typ SSL-2502a ist wegen seines internen FIFO-Zwischenspeichers nicht geeignet für eine ESA22c-Messung da dadurch die Korrelation zu den Laufzeitdaten verloren geht!
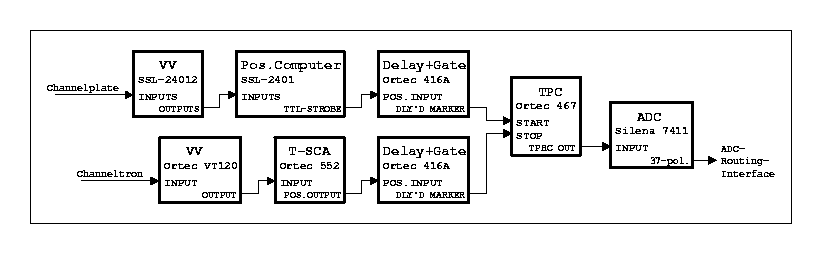
Die Ionen werden über ein Channeltron erfasst und durch Vorverstärker(???) und Constant-Fraction-Diskriminator(???) oder Timing-Filter-Amplifier(???) und Timing-Single-Channel-Analyser(???) zum Stopsignal für den TPC verarbeitet. Als Startsignal dient vorzugsweise der Analog-Strobe des Position-Computers, der eventuell invertiert werden muss (intern oder extern). Weniger geeignet ist der digitale Strobe, den die (optionale) PCIx-Karte direkt oder von Störungen bereinigt anbietet. Das direkte Signal könnte bei einem langen Verbindungskabel zum Position Computer Störungen durch den Datentransfer enthalten. Das direkte ist störungsfrei aber durch Einsynchronisierung um ca. 100ns unscharf. Ungeeignet zu diesem Zweck dürfte hingegen das Busy-Signal sein, das zwar zeitlich genauer ist, aber auch bei allen verworfenen Ereignissen und Störungen auftritt.
Zur Einstellung eines passenden Timings werden sowohl Start- als auch Stop-Signal des TPC über je ein Delay+Gate geführt.
Das TPHC-out-Signal wird einem 'Silena 7411' ADC zugeführt, der seine Daten über das zugehörige Routing-Interface überträgt.
Abb 5. Messung der Laufzeitdifferenzen
In Abhängigkeit von den experimentellen Voraussetzungen treffen die Orts- und Zeitdaten in unterschiedlicher Reihenfolge und mit verschiedener Zählrate ein. Für die nachfolgende Auswertung muss jedoch die Zusammengehörigkeit der Datenwerte als korrelierte Paare erkenntlich sein. Diese Forderung wird durch die XYT-Interface-Karte erfüllt. Das XYT-Interface steuert ein PCI-Interface zur Erfassung der Daten eines 'SSL-2401 Position Computers' und ein ADC-Interface zur Erfassung der Daten eines 'Silena 7411' ADC's mit folgender Logik (im xyt-Mode):
Die Funktion des XYT-Interfaces wird überwacht und gegebenenfalls wird ein Fehlerdatenwort mit der Kennung 0x10 ausgegeben. Die Übertragung des Fehler-Codes erfolgt immer dann, wenn ein Fehler gespeichert ist und keine Datenübertragung aktiv ist.
Errors: die Datenübertragung wird mit Reset von ADC und PCI abgebrochen und statt dessen der Fehler-Code übertragen.
Warnings: die Datenübertragung wird fortgeführt und der Fehler-Code anschließend übertragen.
Timing, normal run: anlg.StrobePC _/^^\______________________/^^\____________________ digt.StrobePC ___/^^\______________________/^^\__________________ ReadyPCI ____/^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^\__________ GateTPC _____/^^^^^^^\_____________________________________ StopGate _____________/^\___________________________________ StartTPC _______/^\_________________________________________ BusyTPC _______/^^^^^^^^^\_________________________________ StopTPC ___________/^\_____________________________________ BusyADC ________________/^^^^^^^^^^^^^^^^^^^^^^^^^\________ ReadyADC ________________________________/^^^^^^^\__________ Reset ______________________________________/^^^\________ Timeout ___________________________________________________
Timing, normal run, no BusyADC or no BusyTPC: anlg.StrobePC _/^^\______________________/^^\____________________ digt.StrobePC ___/^^\______________________/^^\__________________ ReadyPCI ____/^^^^^^^^^^^^^^\__________/^^^^^^^^^\__________ GateTPC _____/^^^^^^^\_________________/^^^^^^^\___________ StopGate _____________/^\_______________________/^\_________ GateTPC _____/^^^^^\___________________/^^^^^\_____________ StartTPC _______/^\_________________________________________ BusyTPC _______/^^^^^^^^^\_________________________________ StopTPC ___________/^\_______________________/^\___________ BusyADC ___________________________________________________ ReadyADC ___________________________________________________ Reset _________________/^^^\_________________/^^^\_______ Timeout ___________________________________________________
Timing, no StopGate: anlg.StrobePC _/^^\______________________/^^\____________________ digt.StrobePC ___/^^\______________________/^^\__________________ ReadyPCI ____/^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^\__________ GateTPC _____/^^^^^^^^^^^^^^^^^^^^^^^^^^\__________________ StopGate ___________________________________________________ StartTPC _______/^\_________________________________________ BusyTPC _______/^^^^^^^^^\_________________________________ StopTPC ___________/^\_____________________________________ BusyADC ________________/^^^^^^^^^^^^^^^^^^^^^^^^^\________ ReadyADC ________________________________/^^^^^^^\__________ Reset ______________________________________/^^^\________ Timeout ___________________________________________________
Timing, no StopGate, no ReadyADC, Timeout: anlg.StrobePC _/^^\______________________/^^\________..._________ digt.StrobePC ___/^^\______________________/^^\______..._________ ReadyPCI ____/^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^...^^^^\____ GateTPC _____/^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^...^^^^\____ StopGate _______________________________________..._________ StartTPC _______/^\_____________________________..._________ BusyTPC _______/^^^^^^^^^\_____________________..._________ StopTPC ___________/^\_________________________..._________ BusyADC _______________________________________..._________ ReadyADC _______________________________________..._________ Reset _______________________________________...___/^^^\_ Timeout _______________________________________...___/^\__
Es ist geplant, über die ESA-Karte die Mode-Einstellung des XYT-Interfaces programmierbar zu machen. Zur Zeit muss der XYT-Mode manuell per Schalter auf dem XYT-Interface eingestellt werden.
Die Zähler und das zugehörige Synchron-Signal werden periodisch mit einem 100ms Takt ausgelesen (Read-Signal) und anschließend gelöscht (Reset-Signal). Das Synchronsignal trennt die einzelnen Zähler-Datensätze und muss deshalb als erstes übertragen werden. Damit dies gewährleistet ist, wird es vom Data-Routing im Vorrangmodus behandelt.
Die Takte zum Auslesen und Löschen der Zähler im Data-Routing werden auf der Synch-Karte erzeugt. Aus dem 10MHz Quarztakt des Routing-Systems wird ein Mastertakt (10Hz) untersetzt aus dem die weiteren Takte abgeleitet werden:
________________________________
_______| |____ Mastertakt
___________
_______| ca. 200ns |_________________________ Read-Takt
___________
___________________| ca. 200ns |_____________ Reset-Takt
Zur Erzeugung definierter Startbedingungen werden bei gestoppter Datenübertragung (durch Hardware oder Software) die Zähler sowie der Mastertakt auf Null gesetzt und gesperrt. Nach einem Start erscheint der erste Mastertakt am Ende der ersten abgelaufenen 1/10 Sekunde.
Da eine Read/Reset-Verteilerkarte eingesetzt wird, wird nur das Read-Signal als Mastertakt für die Verteilerkarte benötigt. Diese erzeugt daraus auf die gleiche Weise Read und Reset.
Zur Zeit muss die Einstellung des benötigten xyt-Modes noch manuell mittels Schalter auf dem XYT-Interface erfolgen!
Folgende Geräteeinstellungen werden bei der Messung von Ort und Laufzeit benötigt:
| DELAYs | Zum Schieben des Koinzidenz-Peaks im Spektrum
|
| DELAY | Gate-TPC muss Start- und Stop-TPC überdecken
| |
| WIDTH | 0.4 us
| |
| AMPLITUDE | 4.5 V |
| RANGE | nach Bedarf
| |
| MULTIPLIER | nach Bedarf
| |
| TPHC OUTPUT DELAY | 0 us
| |
| ANTI COINC/COINC | COINC
| |
| SCA MODE | WINDOW oder nach Bedarf
| |
| SCA INHIBIT | IN oder nach Bedarf
| |
| SCA LLD | 0.2V? oder nach Bedarf
| |
| SCA ULD | 10V oder nach Bedarf
| |
| DC ADJ | 0V
| |
| STROBE SYNC | INT STOP
| |
| STROBE RESET | 120 us
| |
| STOP INHIBIT MODE | OUT oder nach Bedarf
| |
| STOP INHIBIT DELAY | nach Bedarf
|
Achtung!
NIM-Geräte liefern 10V als Ausgangspegel wenn sie nicht mit 50 Ohm
abgeschlossen werden. Dies ist nicht verträglich mit TTL-Eingängen!
Deshalb: 10V-NIM-Ausgänge stets mit 50 Ohm abschließen!
Der Control-Routing-Überrahmen wird vom ESA22c-Programm gemeinsam mit den anderen ESA22-Programmen genutzt.
Die Belegung des Control-Routing durch die Interface-Karten ist frei
wählbar, da die Messprogramme entsprechend konfiguriert werden können.
Zur Zeit (03.Jan.2009) ist folgende Anordnung der Interface-Karten
aktuell (von links):
| Adr. | Karte | Kommentar
| |
| Adress-Decoder | für die folgenden 7 Karten
| ||
| 0x00-01 | CAN-Controler | nutzt 2 Adressen
| |
| 0x02 | Step Nr. Ausgabe | Schrittnummer-Ausgabe
| |
| 0x03 | Messzeit-Ausgabe |
| |
| 0x04 | Pausenzeit-Ausgabe |
| |
| 0x05 | Interrupt Eingabe |
| |
| 0x06 | Zeittakt-Ausgabe |
| |
| 0x07 | Messber.-Eingabe |
| |
|
| |||
| Gate-Buffer | nutzt nur 5V des Routing
| ||
| Read/Reset-Buffer | nutzt nur 5V des Routing
| ||
|
| |||
| Adress-Decoder | für die folgenden 3 Karten
| ||
| 0x60-65 | SM1-Karte | Schrittmotor-Interface
| |
| 0x60-65 | SM2-Karte | Schrittmotor-Interface
| |
| 0x66 | ESA-Karte | Projekt!
| |
|
| |||
| Messbereich-Buffer | nutzt nur 5V des Routing
| ||
|
| |||
|
|
CONTROL-ROUTING |====================| |Messbereich-Buffer | | In|<---------- Ionenstrom-Konverter | 4 * Out|----+-----> Elektronenstrom-Konverter |====================| | |====================| | |ESA-Karte xyt-Mode|----|-----> xyt-Kontrolle (Data-Routing) (Projekt!) |--------------------| | |SM2-Karte | | |--------------------| | |SM1-Karte 40 pol.|----|-----> Schrittmotorsteuerung |--------------------| | | Adress-Decoder | | |====================| | |====================| | |Read/Reset-Buffer | | | 4 * Reset Out|----|-----> Reset (Data-Routing) | 4 * Read Out|----|-----> Read (Data-Routing) | In|<---|------ Synch.-Karte Read (Data-Routing) |====================| | |Gate-Buffer | | | 8 * Out|----|-----> Gate (Data-Routing) | In|<---|-. |====================| | | |====================| | | |Messber.-Eingabe | | | | Ser. In|<---' | |--------------------| | |Zeittakt-Ausgabe | | | Out|------|---> Zeittakt-Zähler, Count (Data Routing) |--------------------| | |Interrupt Eingabe | | | Start|<---. | |--------------------| | | |Pausenzeit-Ausgabe | | | | !Intervall|--. | | | Intervall| | | | |--------------------| | | | |Messzeit-Ausgabe | | | | | Ext. Start|<-' | | | !Intervall|----' | | Intervall|------'--> Schrittnummer-Interface, Read (Data Routing) |--------------------| |Step Nr.-Ausgabe | | 20 pol.|---------> Schrittnummer-Interface, 20 pol. (Data Routing) |--------------------| |CAN-Controler | | 9-pol.|---------> Iseg-HV |--------------------| | Adress-Decoder | |====================|
Der Data-Routing-Überrahmen wird vom ESA22c-Programm gemeinsam mit den anderen ESA22-Programmen genutzt.
Die Belegung des Data-Routing durch die Interface-Karten ist frei
wählbar, da die Messprogramme entsprechend konfiguriert werden können.
Zur Zeit (03.Jan.2009) ist folgende Anordnung der Interface-Karten
aktuell (von links):
| ID | Karte | Funktion
| |
| IFS(1)-Karte | Modus: RUN, FREI
| ||
| 0x00 | Step Nr.-Karte | Matrixnummer-Eingabe
| |
|
| |||
| IFS(1)-Karte | Modus: RUN, FREI
| ||
| 0x02 | U/D-Zähler | Elektronenstrom-Eingabe
| |
|
| |||
| IFS(1)-Karte | Modus: RUN, FREI
| ||
| 0x04 | U/D-Zähler | Ionenstrom-Eingabe
| |
|
| |||
| IFS(1)-Karte | Modus: RUN, FREI
| ||
| 0x06 | U/D-Zähler | Messzeit-Eingabe
| |
|
| |||
| IFS(1)-Karte | Modus: RUN, FREI
| ||
| 0x08 | U/D-Zähler | Position Computer Totzeitverluste
| |
|
| |||
| 0x2b | IFS1-Karte | Modus: LFT, FREI; Steckbr. LFT: Busy+Gate;
| |
| 0x0a | Synch.-Karte | Zähler Synchr. Signal; auf Vorrang verdrahtet;
| |
| ADC/TPC-busy mit 50 Ohm abschließen
| |||
| (wiederverwertete IIC-Taktkarte)
| |||
|
| |||
| 0x2d | IFS1-Karte | Modus: LFT, FREI; Steckbr. LFT: Busy+Gate
| |
| 0x1c | XYT-Karte | x-y-t-Kontrolle; xyt-Mode manuell einstellen!
| |
| 0x0c | PCI-Karte | Position Computer Interface (xy-Daten)
| |
| PCIx-Karte | PCI-Erweiterungskarte; Pileup-Ausgabe
| ||
| 0x2c | ADC-Karte | ADC Interface (t-Daten)
| |
|
| |||
|
|
DATA - ROUTING |===============| |ADC Interface | | 37-pol.|<------- Silena ADC (NIM-Crate) |---------------| |PCIx-Extender | | Pileup|--. |---------------| | |PCI Interface | | | 50-pol.|<-|----- Position Computer Daten |---------------| | |XYT Interface | | | TPC Gate|--|----> TPC Gate (NIM-Crate); | Stop Gate|<-|----- Delay and Gate (NIM-Crate); | Busy TPC|<-|----- TPC Busy (NIM-Crate); | Busy Pos Comp|<-|----- Position Computer Busy; |---------------| | |IFS1 Gate Q|<-|----- Gate-Buffer (Control-Routing) |===============| | |Synch. Karte | | | READ|--|----> Read/Reset-Buffer (Control-Routing) | ADC/TPC busy|<-|----- mit 50 Ohm abschließen |---------------| | |IFS1 Gate Q|<-|----- Gate-Buffer (Control-Routing) |===============| | |U/D-ZLR GATE|<-|----- Gate-Buffer (Control-Routing) | RESET|<-|----- Reset-Buffer (Control-Routing) | READ|<-|----- Read-Buffer (Control-Routing) | COUNT|<-' |---------------| |IFS(1) | |===============| |U/D-ZLR GATE|<------- Gate-Buffer (Control-Routing) | RESET|<------- Reset-Buffer (Control-Routing) | READ|<------- Read-Buffer (Control-Routing) | COUNT|<------- Zeittakt-Interface (Control-Routing) |---------------| |IFS(1) | |===============| |U/D-ZLR GATE|<------- Gate-Buffer (Control-Routing) | RESET|<------- Reset-Buffer (Control-Routing) | READ|<------- Read-Buffer (Control-Routing) | COUNT|<------- Ionenstrom-VFC |---------------| |IFS(1) | |===============| |U/D-ZLR GATE|<------- Gate-Buffer (Control-Routing) | RESET|<------- Reset-Buffer (Control-Routing) | READ|<------- Read-Buffer (Control-Routing) | COUNT|<------- Elektronenstrom-VFC |---------------| |IFS(1) | |===============| |Step Nr. READ|<------- Messzeit-Timer, Intervall (Control-Routing) | 20-pol.|<------- Schrittnummer (Control-Routing) |---------------| |IFS(1) | |===============|
Struktur der ESA22c-Daten-Files
Die ESA22c-Messdaten-Files entsprechen dem Strahlenzentrumsstandard und können
deshalb mit einer Anzahl vorhandener Programme weiterverarbeitet werden.
Sie beginnen mit einem Header von 512 Bytes Länge, der am Anfang einen
standardisierten Teil enthält und anschließend noch eine Reihe
weiterer Daten (z.B. Lifetime-, Realtime-Zähler usw.), zu denen
man über die Include-Files ~/ex_home/ex_src/.../esa22c.conf und esa22c.h Zugang hat.
Anschließend an den Header folgen das Laufzeit-Spektrum (T-) und die
Positions-Matrix (X/Y-).
Die Länge des Laufzeit-Spektrums ist wählbar. Die Länge der
Positions-Matrix ist mit 256 * 256 Kanälen fest vorgegeben.
Die im Standardteil des Headers angegebene Anzahl der Spalten und
Zeilen ist:
COLS = 256
ROWS = 256 + int((<Länge T-Spektrum> -1) / 256) +1
Danach folgen die List-Mode-Daten.
---
|
| Header, 512 Bytes
|
---
|
| t-Spektrum, ((ROWS - 256) * 256 * 4) Bytes
|
---
|
| xy-Matrix, (256 * 256 * 4) Bytes
|
---
|
| List-Mode-Daten, n Bytes
|
.
Struktur der Header Daten:
#define lIDHDR 8
#define lHDLEN 1
#define lEXPMNT 6
#define lIDPRG 8
#define lSTDAT 9
#define lSTTIM 8
#define lSPDAT 9
#define lSPTIM 8
#define lSPENAM 8
#define lSPTYPE 4
#define lPLANES 6
#define lROWS 6
#define lCOLS 6
#define lBYTES 1
#define lHDFREE 4
#define lRESRV 32
#define lLTXT 4
#define lTEXT 80
Plattformabhängige Definitionen:
UINT1: 1 Byte "unsigned int"
UINT2: 2 Bytes "unsigned int"
UINT4: 4 Bytes "unsigned int"
REAL4: 4 Bytes "float"
REAL8: 8 Bytes "float"
typedef union {
struct {
struct {
char idhdr[lIDHDR]; /* Identification of header: "STRZ-VXW" */
char hdlen[lHDLEN]; /* Length of header: "1" */
char expmnt[lEXPMNT]; /* Experiment */
char idprg[lIDPRG]; /* ID of generating Program: "ESA22c " */
char stdat[lSTDAT]; /* Date of start */
char sttim[lSTTIM]; /* Time of start */
char spdat[lSPDAT]; /* Date of stop */
char sptim[lSPTIM]; /* Time of stop */
char spenam[lSPENAM]; /* Name of spectrum */
char sptype[lSPTYPE]; /* Type of spectrum: "ESAc" */
char rows[lROWS]; /* Number of rows: " n" */
char cols[lCOLS]; /* Channels/row: " 256" */
char bytes[lBYTES]; /* Bytes/channel: "4" */
char hdfree[lHDFREE]; /* First free byte in header (0,...) */
char planes[lPLANES]; /* Number of planes: " 1" */
char resrv[lRESRV]; /* Reserved */
char ltxt[lLTXT]; /* Length of text: "80" */
char text[lTEXT]; /* Text */
} stddat; /* Standard data of header */
struct {
UINT2 status; /* Status of spectrum */
UINT4 clkcnt; /* Realtime from Routing */
UINT4 rltcnt; /* Realtime from CPU */
UINT4 lftcnt; /* Lifetime */
UINT4 datcnt; /* Processed positions */
UINT4 pilcnt; /* Lost Position Computer pilups data */
UINT4 liscnt; /* Transfered List Mode bytes */
UINT4 outcnt; /* Positions out of range */
UINT4 xsqerr; /* XYT data sequence errors */
UINT4 csqerr; /* Counter data sequence errors */
UINT4 dclcnt; /* Lifetime for Duty cycle calculation */
UINT4 xyterr; /* XYT interface errors */
UINT4 rejcnt; /* Rejected data */
UINT4 fulcnt; /* Fifo full counter */
UINT4 errcnt; /* Error counter */
UINT4 runtim; /* Realtime to run experiment [s] */
UINT4 adclen; /* Length of ADC spectrum */
UINT4 pcmlen; /* Length of Pos. Comp. matrix */
UINT4 pcmoff; /* Offset of Pos. Comp. matrix */
UINT4 ielec; /* Integrated current electr beam */
UINT4 iions; /* Integrated current ion beam */
REAL8 iprod; /* Integrated (ielec * iions) */
UINT4 steps; /* Number of energy steps */
UINT1 stepmod; /* Step mode (u/d/b) up/down/both */
UINT2 rmpwait; /* Pause when voltage ramping */
REAL8 stpsiz; /* Energy step size [eV] */
REAL8 mine; /* Min. scan energy [eV] */
REAL8 maxe; /* Max. scan energy [eV] */
REAL8 decelv; /* Deceleration voltage [V] */
REAL8 sttime; /* Startup time [s] */
REAL8 offtime; /* Off time [s] */
REAL8 ontime; /* On time [s] */
REAL4 expar[25]; /* Extended ESA22c parameters */
} spcdat; /* Special data of header */
} hdata; /* Header data */
struct {
char h512[512]; /* Fill 512 bytes block */
} htotal; /* Total header */
} HEADER;
Experiment-Parameter:
expar[ ] | ---------+-------------------------------------------- 0 | Electron beam energy [eV] 1 | Ion charge [q] 2 | Ion mass [amu] 3 | Ion energy [eV] 4 | Efficiency [%] 5 | Time base divider (freq= 2**(-EXPAR[5]) MHz) 6 | Electron current converter range 7 | Electr. current conv. full scale freq. [Hz] 8 | Ion current converter range 9 | Ion current converter full scale freq. [Hz] 10 | Entrance slit [mm] 11 | Exit slit [mm] 12 | Calibration constant 1 13 | Calibration constant 2 14 | Pass energy [eV] 15 | Chamber pressure [mb] 16 | Buffer pressure [mb]
Struktur der List Mode Daten:
| Record | ID Byte | Data Bytes
| |
| Start and restart marker: | 1111 1111 | >2: 0xff, 0xff,...
| |
| Fifo full: | 10xx xxxx | 0: -
| |
| Lifetime: | x010 0001 | 1: original ID
| |
| XYT error: | x001 0000 | 2: s.u.
| |
| ADC data: | x010 0000 | 2: high,low
| |
| Pos. Comp.: | x000 0000 | 2: y,x
| |
| Matrix number: | x000 0010 | 2: high,low
| |
| Electr beam: | x000 0100 | 2: high,low
| |
| Ion beam: | x000 0110 | 2: high,low
| |
| Time base counter: | x000 1000 | 2: high,low
| |
| Pileup counter: | x000 1010 | 2: high,low
| |
| Counters sync. signal: | x000 1110 | 0: -
| |
| Duty cycle: | x000 1111 | 0: -
|
Der "Start and restart marker" steht zu Beginn der List Mode Daten und wird bei jedem Restart der Messung als erstes neu geschrieben.
Bei mehreren Daten-Bytes kommt das höherwertige zuerst.
"Pos. Comp". und "ADC data" dürfen nur in der folgenden Reihenfolge auftreten, sonst liegt ein Fehler (x-y-t data sequence error) vor:
Pos. Comp., ADC data
Das "Counters sync. signal" muss stets vor den anderen vier Zählerdaten (Electr beam, Ion beam, Time base counter, Pileup counter) eintreffen, sonst liegt ein Fehler (Counters sequence error) vor.
Das "Fifo full Bit" zeigt an, dass durch Überlauf des Fifos-Speichers im Routing wegen Überlast eine unbekannte Anzahl von Daten verloren gegangen ist.
XYT Error Byte:
Für jede Messung wird intern ein Experiment-Control-File (ECF) erstellt, dessen Daten zur Kontrolle eingesehen werden können.
Die EC-File-Daten beginnen mit der Definition aller anzusprechenden Control-Routing-Adressen. Das erste Byte enthält die Anzahl der Interface-Adressen, und die folgenden Bytes enthalten die Interface-Adressen selber.
Danach folgt ein Startup-Block, in dem alle Parameter auf ihren Anfangswert gesetzt werden. Anschließend folgt für jedes Messintervall ein Parameterblock, der nur alle zu verändernden Parameter enthalten braucht, jedoch mindestens einen Parameter.
Ein solcher Parameterblock beginnt mit der Anzahl der zu verändernden Parameter (1 Byte), gefolgt von einem Steuer-Byte:
0,1,.,n Beschreiben eines Registers in einem Control Routing Interface
n ist die Position der Registeradresse in der zu Beginn
definierten Adressenliste. Es folgen 2 Data-Bytes.
1. Byte: low Byte
2. Byte: high Byte
0x80 Ausgabe einer Iseg-HV Spannung. Es folgen 4 Data-Bytes.
1. Byte: Iseg-HV Kanalnummer
2.-4. Byte: Spannungswert in 0.1mV (high Byte zuerst)
0x81 Iseg-HV Einschwingvorgang abwarten. Es folgen keine Data-Bytes.
0x82 Test des Zeitverhaltens des Iseg-HV. Es folgen keine
Data-Bytes.
Der Steuer-File wird abgeschlossen mit 0x00 oder 0xff. Bei 0x00 beginnt das Messprogramm wieder von vorne mit dem ersten Messintervall, bzw. es beendet die Messung, falls in der Zwischenzeit ein 'STOP MESSUNG' gegeben wurde. Bei der Wiederholung von vorne werden die Adressendefinition und der Startup-Block übersprungen. Bei 0xff endet die Messung nach dem ersten Durchlauf.
Ein EC-File enthält mindestens eine Adressendefinition, eine Anfangsnormierung und ein Messintervall.
Beispiel für einen EC-File:
char ecfdat[512] /* Definition der Control-Routing-Adressen */ ecfdat[0] = 2 /* Length of address list */ ecfdat[1] = 0x40 /* Address timer modul */ ecfdat[2] = 0x41 /* Address interrupt modul */ /* Anfangsnormierung */ ecfdat[3] = 2 /* Number of commands */ ecfdat[4] = 0 /* Position in address list */ ecfdat[5] = 0xFA /* }(low byte) Timer=.5ms */ ecfdat[6] = 0x01 /* }(high byte) */ ecfdat[7] = 1 /* Position in address list */ ecfdat[8] = 0xA5 /* }(low byte) Test */ ecfdat[9] = 0xA5 /* }(high byte) */ /* 1. Messintervall */ ecfdat[10] = 1 /* Number of commands */ ecfdat[11] = 0 /* Position in address list */ ecfdat[12] = 0xFA /* }(low byte) Timer=.5ms */ ecfdat[13] = 0x01 /* }(high byte) */ /* 2. Messintervall */ ecfdat[14] = 1 /* Number of commands */ ecfdat[15] = 0 /* Position in address list */ ecfdat[16] = 0xFA /* }(low byte) Timer=.5ms */ ecfdat[17] = 0x01 /* }(high byte) */ /* End of file */ ecfdat[18] = 0 /* End of file */
Das Programm ist weitgehend selbsterklärend. Die notwendigen Eingaben werden in Dialogform angefordert. Der Dialog ist in einer Hierarchiestruktur aufgebaut, wobei mittels Menülisten von einer Dialogebene in die andere gewechselt werden kann. Für Parametereingaben existieren im Allgemeinen Vorbelegungswerte, die editiert werden können.
--- ESA22c Top-Menü ---
--- ESA22c Start-Menü ---
--- ESA22c Parameter-Eingabe ---
--- ESA22c Funktionen bei laufendem Experiment ---
--- ESA22c Konfigurations-Menü ---
Verlassen des Programmes.
Führt zum ESA22c Start-Menü. (See ESA22c Start-Menü.)
Zeigt die wichtigsten Daten des Headers, der jedem Spektrum beigefügt ist:
Auf den folgenden Seite werden die Ergebnisse der Stromintegration, die Experiment beschreibenden Parameter und die Experiment-Steuer-Parameter ausgegeben.
Die Darstellung des Headers kann mit der Leertaste wiederholt und mit der Return-Taste beendet werden. Für ein nicht existierendes Spektrum (Status new) erfolgt eine gekürzte Ausgabe.
Startet als Subtask ein Auswerteprogramm zur graphischen Darstellung und Auswertung des aktuellen Spektrums. Eine gestartete Messung läuft während der Auswertung weiter. Nach Verlassen des Auswerteprogramms wird in das Messprogramm zurückgekehrt. Üblicherweise kann das Startup-Verhalten der Auswerteprogramme konfiguriert werden (^Z -> Set configuration -> Startup mode).
ESA22c verwendet standardmäßig das Programm ESA22a als Auswerteprogramm. Unter "Set Configuration" kann ein anderes Auswerteprogramm konfiguriert werden.
Ein existierendes Spektrum wird gelöscht (im Arbeitsspeicher und auf dem Host-Rechner), die Daten sind verloren.
Das Spektrum wird mit oder ohne Header und mit oder ohne Kanalnummern in ASCII Form auf einen File geschrieben.
Falls die Eingabe der Header-Daten fehlerhaft war, besteht hier die Möglichkeit zur Korrektur. Jedoch nur für die experimentbeschreibenden und nicht für die messungsrelevanten (z.B. Spektrumslänge) Header-Daten.
Einige der VxWorks-Shell-Kommandos (cd, ls, pwd, whoami) können ausgeführt werden.
Führt zum ESA22c Konfigurations-Menü. (See ESA22c Konfigurations-Menü.)
Bringt diese Anleitung über das menüorientierte GNU-INFO-Programm auf den Bildschirm. INFO läuft dabei auf einem Server (z.Z. Servix).
Rückkehr zum Top-Menü.
Start der Messung, falls noch kein Spektrum des angegebenen Namens existiert (Status new). Das Spektrum wird auf der Platte des Host-Rechners angelegt, ist zunächst jedoch noch leer. Für ein bereits existierendes Spektrum erfolgt eine Fehlermeldung (Status old).
Für den Start einer Messung müssen die zugehörigen Parameter eingegeben
werden.
(See Experiment-Parameter-Eingabe.)
(See Funktionen bei laufendem Experiment.)
Start der Messung, falls sie mit einem bereits existierenden Spektrum (Status old) fortgesetzt werden soll. Das Spektrum wird vom Host-Rechner geladen, falls es noch nicht da ist. Für ein noch nicht existierendes Spektrum erfolgt eine Fehlermeldung (Status new).
Für den Restart der Messung kann nur ein Teil der zugehörigen Parameter
geändert werden.
(See Experiment-Parameter-Eingabe.)
(See Funktionen bei laufendem Experiment.)
Start der Messung, falls noch kein Spektrum des angegebenen Namens existiert (Status new), ohne jedoch auf dem Host-Rechner einen File anzulegen. Beim Stop der Messung wird angefragt, ob die Messdaten noch gerettet werden sollen. Auch während der Messung können die Daten mit 'Save spectrum' zum Host-Rechner gerettet werden.
Die Messdaten können während des TEST RUNs im Speicher (nicht auf der Platte) gelöscht werden mittels einer Funktion im Display-Programm (Analyse spectrum).
Für den Start der Messung müssen die zugehörigen Parameter eingegeben
werden.
(See Experiment-Parameter-Eingabe.)
(See Funktionen bei laufendem Experiment.)
Druckt wahlweise den Hardware-Status oder Status und Daten, so wie sie vom Experiment übertragen werden, direkt auf dem Bildschirm aus. Diese Funktion dient Diagnosezwecken (z.B. Ermittelung der Datenkennung).
Für den Start einer Messung müssen die zugehörigen Parameter eingegeben werden. Einige der Parameterangaben sind notwendig für die Durchführung der Messung, andere haben nur beschreibende Funktion. Für den Restart der Messung kann nur ein Teil der zugehörigen Parameter geändert werden.
$HOME/ex_home/ex_param/esa22.par festgehalten.
Die existierenden Parameter-Sets werden aufgelistet.
$HOME/ex_home/ex_data/esa22.ttt
gespeichert.
Die Messung wird gestoppt und die Daten werden zum Host-Rechner übertragen (See Archivierung der Daten.). Im Modus "Test Run" wird allerdings zuerst abgefragt, ob die Daten gerettet werden sollen, Default ist "no".
Treten bei der Datenübertragung Probleme auf, so erfolgt eine Fehlermeldung. Die Daten bleiben erhalten und der Stop kann wiederholt werden.
Alte Version:
Während der laufenden Messung kann das Spektrum zum Host-Rechner gerettet
werden. Auf einem Unix-Host wird dabei ein bereits existierendes Spektrum
gleichen Namens überschrieben. Ebenso wird ein auf diese Weise gerettetes
Spektrum am Ende bei einem "Stop experiment" wieder überschrieben (nicht
im Modus "Test Run"). Soll es erhalten bleiben, so muss es zuvor umbenannt
werden.
Neue Version:
Es existieren mehrere Möglichkeiten um während einer laufenden Messung
das Spektrum zum Host-Rechner zu retten:
Number of backups
Es wird höchstens die angegebene Anzahl Backups durchgeführt.
Time between backups [min]
Zeitlicher Abstand zwischen den Backups in Minuten und Zeit bis zum
ersten Backup. Im Falle einer Scan-Messung wird nach Ablauf dieser Zeit
ggf. noch auf das Ende eines Scan-Durchlaufs gewartet.
Save to master(0)/new(1) file
Das Backup kann sowohl auf den normalen Daten-File (Master) erfolgen,
der dann jeweils überschrieben wird, oder es wird jedes Mal ein neuer
File angelegt, dessen Name Datum und Uhrzeit enthält.
Stop data while saving(0/1) bei Messungen von Spektren
Wenn die Messung während des Backups weiterläuft könnte das
ein 'schiefes' Spektrum zur Folge haben falls die Zeit für die
Datenübertragung nicht deutlich kürzer ist als die Messzeit.
Save at end of scan(0/1) bei Scan-Messungen
Ein Backup mitten in einem Scan-Durchlauf hat eine Stufe in den
Messdaten zur Folge.
Zeigt die wichtigsten Daten des Headers, der jedem Spektrum beigefügt ist:
Auf den folgenden Seite werden die Ergebnisse der Stromintegration, die Experiment beschreibenden Parameter und die Experiment-Steuer-Parameter ausgegeben.
Die Darstellung des Headers kann mit der Leertaste wiederholt und mit der Return-Taste beendet werden. Für ein nicht existierendes Spektrum (Status new) erfolgt eine gekürzte Ausgabe.
Startet als Subtask ein Auswerteprogramm zur graphischen Darstellung und Auswertung des aktuellen Spektrums. Eine gestartete Messung läuft während der Auswertung weiter. Nach Verlassen des Auswerteprogramms wird in das Messprogramm zurückgekehrt. Üblicherweise kann das Startup-Verhalten der Auswerteprogramme konfiguriert werden (^Z -> Set configuration -> Startup mode).
ESA22c verwendet standardmäßig das Programm ESA22a als Auswerteprogramm. Unter "Set Configuration" kann ein anderes Auswerteprogramm konfiguriert werden.
Hiermit kann das Messprogramm verlassen werden, ohne dass die Messung unterbrochen wird. Die Kontrolle über das Messprogramm gewinnt man zurück durch einen erneuten Start.
Achtung: es existiert zur Zeit keine Sicherung gegen ein weiteres Starten eines anderen Messprogrammes, das die laufende Messung stören könnte!
Unter diesem Konfigurations-Menü erfolgen alle notwendigen Anpassungen des Programmes. Beim allerersten Start des Messprogrammes wird dieser Menüpunkt stets automatisch aufgerufen. Danach sollte er nur noch bei Konfigurationsänderungen benutzt werden.
Rückkehr zum Top-Menü.
Name of experiment
Dieser Name wird im Header des Spektrums als Experimentname eingetragen.
Print verbose messages
Delay messages
Check task stack
Unter dem Menüpunkt "Analyse spectrum" wird ein Auswerteprogramm gestartet, das an dieser Stelle spezifiziert werden muss. Im folgenden Beispiel wird davon ausgegangen, dass das Messprogramm MCA das Auswerteprogramm PEAK verwendet:
File: /usr/exp/ex_prog/peakv.o
Symbol: _peak
Task: tMcaBg
Argmts: ,,"peak_mca.vxw",,'S'
| S | Einzelspektrums-Darstellung.
| |
| M | Matrix-Darstellung (Hidden Lines).
| |
| C | Matrix-Darstellung (Contour Plot).
| |
| I | Peak-Integration, Wirkungsquerschnitts-Berechn. usw.
| |
| X | S oder M wird passend ausgewählt.
|
Task priority: 100
Task options: 0x00000008
Task stack: 5000
Unload: 1
Stack check: 0
Falls das Data-Routing im Experiment zum Einsatz kommt, muss die Software wissen, auf welchem Wege das Data-Routing ans VME angeschlossen ist. Es gibt hierfür mehrere Möglichkeiten:
Falls das Control-Routing im Experiment zum Einsatz kommt, muss die Software wissen, auf welchem Wege das Control-Routing ans VME angeschlossen ist. Es gibt hierfür mehrere Möglichkeiten:
Festlegen der Datenkennungs-Bits.
Zur Unterscheidung der Daten von verschiedenen Datenquellen sind die Messdaten mit einer Steckplatz abhängigen Kennung versehen. Diese kann ermittelt werden aus der Anzeige der Interfacesteuerungen im Routing-Einschub (siehe Routing-Beschreibung), oder durch Darstellung der Messdaten mittels der Funktion 'Print hardware info' auf dem Bildschirm.
Zur Zeit (27.Jun.2011) sind folgende Data-Routing-IDs aktuell:
Step number input = 0x00 Ion beam counter = 0x02 Pressure counter = 0x04 Time base counter = 0x06 Counters sync. signal = 0x08 Duty cycle interface = 0x29 Channeltron data = 0x0a Lifetime = 0x2b
Festlegen der Steckplatz abhängigen Registeradressen für die einzelnen Steuerfunktionen.
Zur Zeit (03.Jan.2009) sind folgende Control-Routing-Adressen aktuell:
CAN controller = 0x00-01 Step number output = 0x02 On timer = 0x03 Off timer = 0x04 Interrupt register = 0x05 Time base out = 0x06 Current conv. range in = 0x07 Step motor interface = 0x60-65 xy/xyt/t mode control = 0x66
Der Elektronenstrom wird über einen Spannungs-Frequenz-Konverter in eine Frequenz gewandelt. Der Konverter ist so ausgelegt, dass er bei Vollausschlag auf dem Keithly-Elektrometer 500kHz abgibt. Für die einzelnen Messbereiche kann es jedoch geringfügige Abweichungen geben, die durch eine exakte Messung bestimmt werden müssen. In den Elektronenstrom-Konversions-Faktoren können diese Abweichungen berücksichtigt werden.
Der Ionenstrom wird über einen Spannungs-Frequenz-Konverter in eine Frequenz gewandelt. Der Konverter ist so ausgelegt, dass er bei Vollausschlag auf dem Keithly-Elektrometer 500kHz abgibt. Für die einzelnen Messbereiche kann es jedoch geringfügige Abweichungen geben, die durch eine exakte Messung bestimmt werden müssen. In den Ionenstrom-Konversions-Faktoren können diese Abweichungen berücksichtigt werden.
Für das über den CAN-Bus gesteuerte IsegHV-Netzgerät werden folgende Parameter benötigt:
Vorbelegungen:
IsegHV CAN ID = 0x7f CAN bus speed = 1 Mbaud / 8 Min. voltage = 0 V Max. voltage = 1000 V Show voltages = 0
Die VME-Systeme besitzen in der Regel keine eigenen Medien zum Speichern der Messdaten sondern sie benutzen die Dienste von Servern im Netzwerk.
Unter VxWorks, dem Betriebssystem der VME-Rechner, wird im Boot-File des
VME-Rechners der Server und der User-Account festgelegt, von dem das
System gebootet wird.
Nach dem Booten eines VME-Rechners ist, wie bei einem normalen Login,
die Home-Directory des Users als Work-Directory eingestellt. Mit
cd "path" ("'s nicht vergessen!) bewegt man sich in fast gewohnter
Weise durch die Directory-Hierarchie. Die Schreibweise für
Pfadangaben richtet sich nach dem Host-Rechner.
Diese Netzwerkzugriffe erfolgen über RSH oder FTP (im Boot-File festgelegt). Für RSH muss der File $HOME/.rhosts die entsprechende Freigabe enthalten.
Für den Transfer großer Datenmengen, insbesondere bei "List-Mode" Messungen, sind RSH und FTP jedoch nicht geeignet. In solchen Fällen sollte der Datentransfer über NFS erfolgen. Dazu muss auf dem Host-Rechner der /etc/exports File die notwendigen Freigaben enthalten und in den Boot-Script-File $HOME/ex_home/ex_param/startup.vxw müssen die benötigten NFS-Verbindungen eingetragen werden.
Um das Ganze übersichtlich zu halten, werden die VME-Systeme in der
Regel zur Zeit folgendermaßen betrieben:
$HOME/ex_home/ex_data: Messdaten
$HOME/ex_home/ex_help: Help-Files für die Mess- und Auswerteprogramme
$HOME/ex_home/ex_param: Parametersätze der Mess- und Auswerteprogramme
$HOME/ex_home/ex_prog: Mess- und Auswerteprogramme
$HOME/ex_home/vxw: VxWorks Betriebssysteme für die VME-Rechner
bootHost:spektr.spe $HOME/spektr.spe
bootHost:ddd/spektr.spe $HOME/ddd/spektr.spe
~/spektr.spe $HOME/spektr.spe
~/ddd/spektr.spe $HOME/ddd/spektr.spe
spektr.spe ./spektr.spe
ddd/spektr.spe ./ddd/spektr.spe
home:spektr.spe $HOME/spektr.spe
data:spektr.spe $HOME/ex_home/ex_data/spektr.spe
Weitere NFS-Laufwerke können im Boot-Script-File freigegeben bzw. neu
definiert werden.
Die existierenden NFS-Laufwerke können Sie sich mit dem SHOW-Programm
unter "Network(NFS) devices" anzeigen lassen.
home:ex_home/ex_data/test.spe -> home:./ex_home/ex_data/test.spe
$HOME/ex_home/ex_param/<Programmname>par.vxw
auf, um sie bei einem nachfolgenden Start als Default-Werte anbieten zu können.
In der obersten Zeile wird an erster Stelle der Name des Programmes dargestellt. An zweiter Stelle folgt die Statusinformation offline/online/test, die anzeigt ob die Messung gestartet ist oder nicht. Dann folgt der Name des Spektrums und am Ende der Zeile eine detaillierte Statusanzeige in hexadezimaler Form von folgender Bedeutung:
STATUS of spectrum (hexadecimal)
0001 Spectrum created on disk
0002 Spectrum saved on disk
0004 Spectrum created in memory
0008 Spectrum loaded in memory
0010 Experiment online
0020 Autonomous stop of experiment
0040 Test run
0100 Experiment failure
0200 Wrong typ of spectrum
0400 Error reading header of spectrum
0800 Error reading spectrum file
1000 Header loaded
Die zweite Zeile dient der Ausgabe von Fehlermeldungen (blinkend), sowie Informationen über die augenblicklichen Aktivitäten des Programmes.
Die Messungen wurden mit dem eingebauten ADC (0.1mV Auflösung) des Iseg8210n 505F Netzgerätes durchgeführt am Kanal 7. Es wurden verschiedene Spannungssprünge zu höheren und niedrigeren Spannungen untersucht. Da der ADC für jeden Kanal nur etwa alle Sekunde ein neues Ergebnis liefert, wurden die Spannungssprünge und Messungen vielfach wiederholt. Da Messungen und Spannungssprünge asynchron zueinander sind, erhält man so mit der Zeit auch alle Zwischenwerte. Die Messwerte wurden mit der größtmöglichen Geschwindigkeit (ca. 1ms) ausgelesen aber nur die Werte nach einer Änderung registriert. Dies kann im Falle, dass zwei aufeinanderfolgende Messungen innerhalb der Auflösung des ADC (0.1mV) gleich sind, eine um ca. 1s zu lange Zeit ergeben. Die Wahrscheinlichkeit dafür ist jedoch gering und dies kann nicht während des Fahrens der Spannung auftreten. Als Zeittakt diente der 10ms Takt des Computer-Systems. Offensichtlich funktioniert dieses Verfahren nicht immer richtig und es gibt gelegentlich zeitliche Fehlmessungen (Abb.6.1) deren Ursache unklar ist.
Das Iseg8210n 505F Netzgerät benötigt einige Zeit bis die Spannungen innerhalb vorgegebener Toleranzen stabil stehen. Nach Erhalt des Spannungskommandos vergehen ca. 200ms bis es mit dem Fahren der Spannung beginnt (Abb.6.1). Die Geschwindigkeit des Fahrens (Ramp Speed, max. 100V/s) wird vorgegeben. Die Fahrphase kann über Status-Bits (Ramp-Bits) gemeinsam für alle Kanäle (General Status) oder individuell für die einzelnen Kanäle (Channel Status) abgefragt werden. Das Status-Bit im General Status ist allerdings eine völlig unzuverlässige Angelegenheit: es erscheint meist mit erheblicher, unterschiedlicher Verspätung und ebenso endet es zu einem eher zufälligen Zeitpunkt. Die Ramp-Bits im Channel Status sind zuverlässiger, wenn man beachtet, dass auch sie mit etwa 80 - 120 ms Verspätung erst gesetzt werden.
Nach Abschluss der Fahrphase folgt eine Einschwingphase, deren Verlauf auch von der äußeren Last abhängt. Ohne Lastwiderstand ist ein erhebliches Unterschwingen beim Runterfahren aufgetreten (Abb.6.2). Unabhängig vom Lastwiderstand kann man bei größeren Spannungssprüngen zwei exponentielle Komponenten von etwa 1.5s und 15s Abklingzeit beobachten (Abb.6.3).
Nach der Einschwingphase ergeben die Spannungsmessungen eine Verteilung mit einer Halbwertsbreite von etwa 10mV (Abb.6.4). Dabei bleibt allerdings offen ob diese Streuung von der Messung herrührt oder die Unschärfe der Spannung wiedergibt. Da die Messung über 2 Tage gelaufen ist, beinhaltet sie auch die Langzeitstabilität.
Für 10 Spannungsprünge von 1V, 2V, ..., 512V, ausgehend bzw. endend bei 50V, wurde bei einer Ramp-Speed von 100V/s untersucht, nach welcher Zeit der Mittelwert der Verteilung sich auf 5mV dem Endwert genähert hat (Abb.6.5-8). Diese Ergebnisse wurden mit einer Hyperbel gefittet, um eine Formel für die notwendige Pausenzeit T in Abhängigkeit vom Spannungsprung U zu erhalten:
T = P1 * SQRT(P2 + U^2) + P3 Spannung steigend fallend P1 50.55 41.02 P2 38.58 127.00 P3 127.29 9.38
Von S100 = 100V/s abweichende Ramp-Speeds Sx wurden, ohne experimentelle Nachprüfung, durch die folgende Rechnung berücksichtigt:
Tx = T - Tr100 + Trx mit Tr = U / S, dem jeweiligen Anteil der Ramp-Speed S an T.
Alle nachfolgenden Messungen wurden mit einer Ramp-Speed von 100V/s durchgeführt.
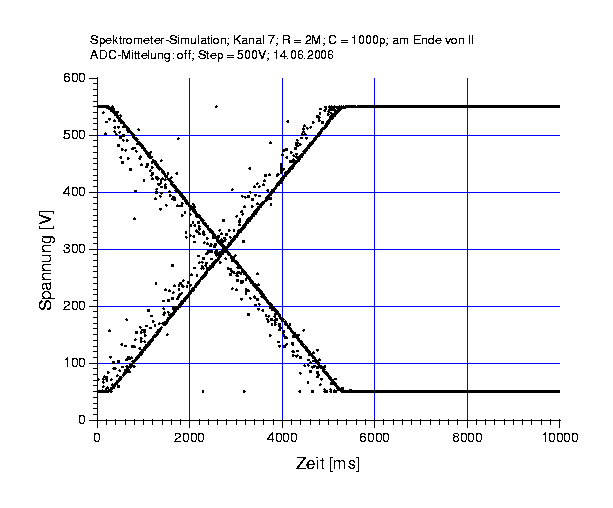
Abb.6.1: 500V Spannungssprung
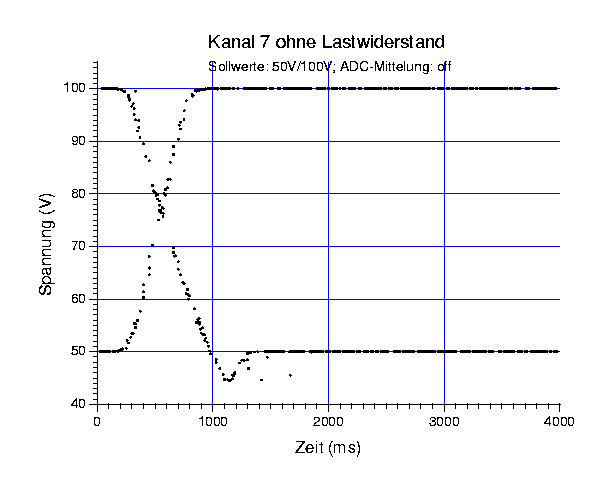
Abb.6.2: Unterschwingen bei fehlender Last
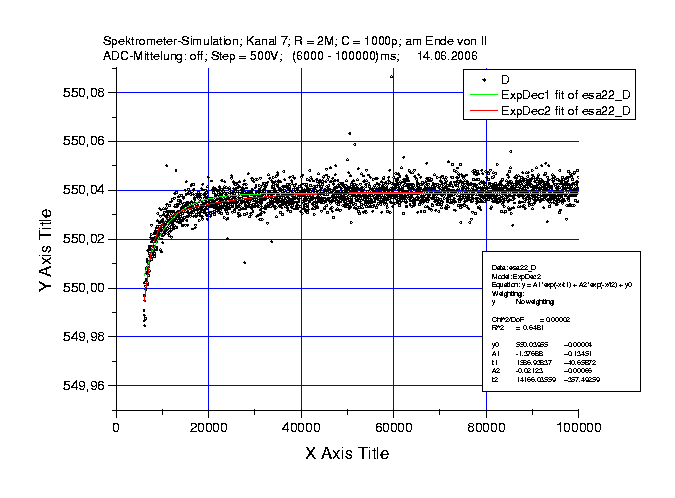
Abb.6.3: Einschwingphase
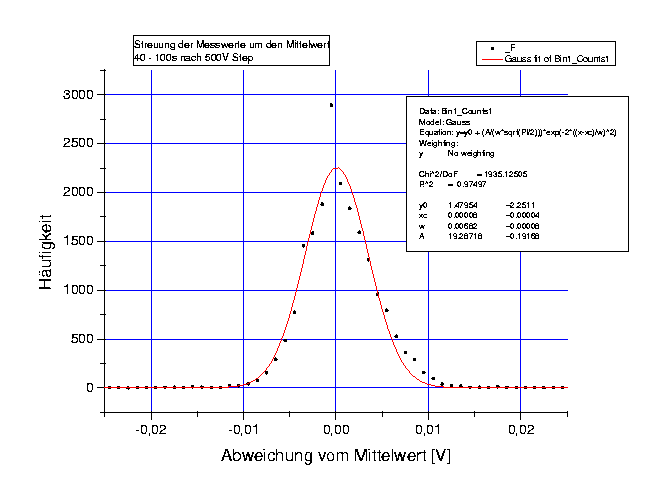
Abb.6.4: Streuung der Messwerte
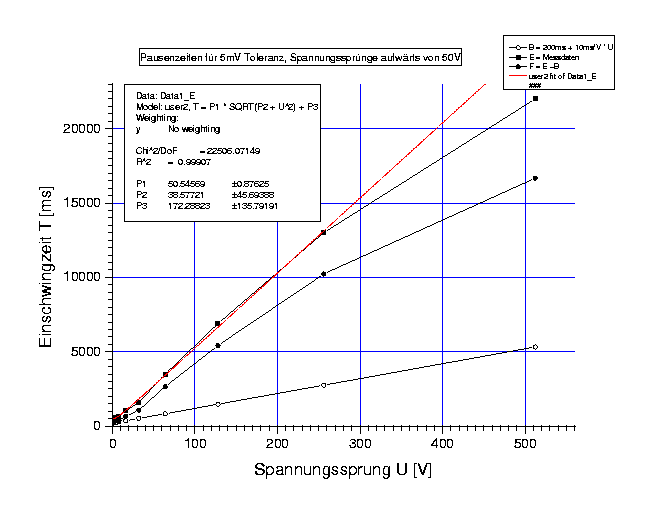
Abb.6.5: Einschwingzeiten für Spannungssprünge aufwärts (5mV Toleranz)
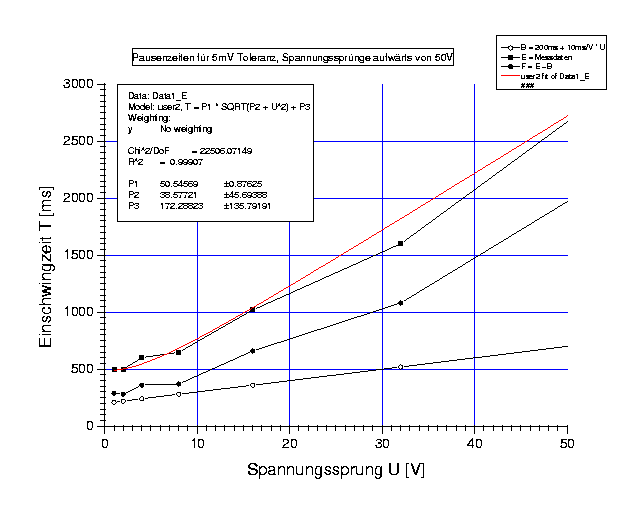
Abb.6.6: Ausschnitt von Einschwingzeiten für Spannungssprünge aufwärts
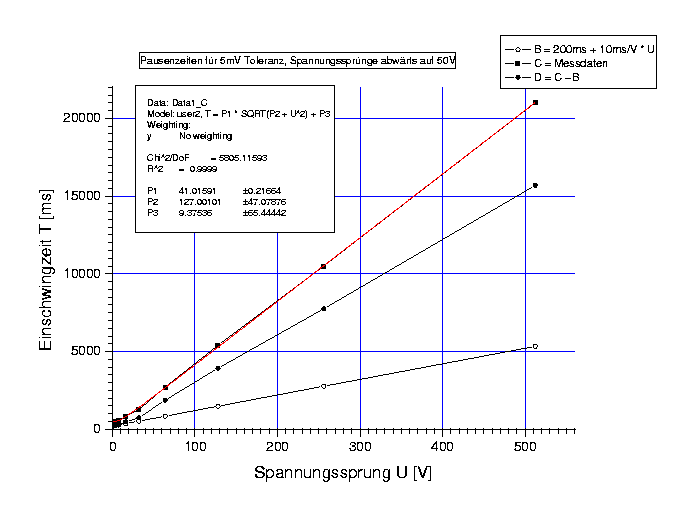
Abb.6.7: Einschwingzeiten für Spannungssprünge abwärts (5mV Toleranz)
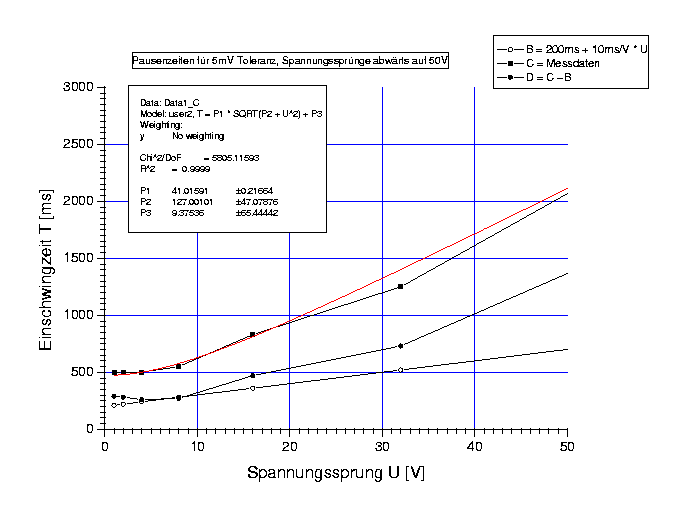
Abb.6.8: Ausschnitt von Einschwingzeiten für Spannungssprünge abwärts