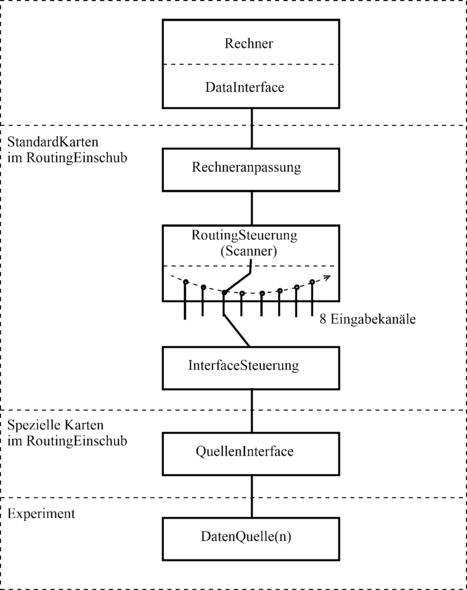
Abb. 2.1.0.1 Dateneingabe mit dem Data-Routing-System
(Multiplexer für 16-Bit Dateneingabe)
März 1995 K. Huber, Strahlenzentrum Univ. Gießen
Version 11.Oct.2024
| • Einleitung | ||
| • Aufbau und Funktion | ||
| • Standard-Interface-Karten | ||
| • Spezielle Interface-Karten | ||
| • Zählratenstatistik | ||
| • Technische Details | ||
| • Oldies |
Nächste: Aufbau und Funktion, Nach oben: Top [Inhalt]
Zur Datenerfassung und Experimentsteuerung existieren zwei verschiedene Rechner-Interfaces, das Data-Routing und das Control-Routing, so genannt nach den Aufgaben, zu denen sie im Wesentlichen eingesetzt werden:
Die vorliegende Funktionsbeschreibung befasst sich
ausschließlich mit dem Data-Routing. Es wird im folgenden oft
abgekürzt als Routing bezeichnet.
Für das Control-Routing existiert eine eigene Beschreibung.
Das Kapitel Aufbau und Funktion gibt einen Überblick über den Aufbau das Data-Routing.
Das Kapitel Standardkomponenten enthält die Aufgabenbeschreibungen und Bedienungsanleitungen der Standardkarten des Routing.
Das Kapitel Standard-Interface-Karten enthält die Aufgabenbeschreibungen und Bedienungsanleitungen der Routing-Karten, die allgemein bei Experimenten zum Einsatz kommen.
Das Kapitel Spezielle Interface-Karten enthält eine Aufstellung der Routing-Karten, die für einzelne Experimente entwickelt wurden. Ihre Beschreibung findet man i.a. in den Unterlagen der Experimente, bei denen sie eingesetzt werden.
Das Kapitel Technische Details gibt technische Detail-Informationen über die Komponenten und deren Schnittstellen.
Im Kapitel Oldies sind überholte Beschreibungen gesammelt.
Vorige: Einleitung, Nach oben: Top [Inhalt]
| • Aufbau des Routing | ||
| • Überrahmen |
Nächste: Ueberrahmen, Nach oben: Aufbau und Funktion [Inhalt]
Abb. 2.1.0.1 Dateneingabe mit dem Data-Routing-System
Vorige: Aufbau des Routing, Nach oben: Aufbau und Funktion [Inhalt]
Das Data-Routing ist in einem 19"-Überrahmen untergebracht
mit 20 Steckplätzen für Europakarten (Abb. 2.2.0.1).
Es wird der
gleiche Überrahmen wie für das Control-Routing verwendet. In
Ausnahmefällen können Data-Routing und Control-Routing im gleichen
Überrahmen untergebracht werden, wenn die Bus-Verdrahtung in
der Mitte durchtrennt wird und für die zweite Hälfte ein
Bus-Abschluss nachgerüstet wird.
Die Routing Back-Plane enthält 42 allgemeine Bus-Leitungen für
die Routing-Steuerung und 11 Privat-Bus-Leitungen zur
Kommunikation benachbarter Karten.
Außer der Spannungsversorgung sind alle Schaltungskomponenten
auf steckbaren Karten untergebracht.
Als Steckverbindung zum Routing-Bus werden 64-polige VG-Stecker verwendet. Die Anschlüsse der VG-Leisten sind im Überrahmen zum Teil als durchgehender Bus verdrahtet (allg. Bus: 1a,1c,...,21c) und zu einem anderen Teil bestehen Verbindungen zu benachbarten Steckerleisten (Privat-Bus: 22a/c,...,32a/c) (Siehe Routing-Bus.). Ferner ist für jede Leiste von links beginnend eine Steckplatzkodierung von 0-7 verdrahtet, wobei jedoch jeweils zwei benachbarte Leisten die gleiche Kodierung haben. Die vier überbleibenden Steckplätze am rechten Ende erhalten alle die Kodierung 7. Sie sind vorzugsweise für die Rechner-Anpassung und Routing-Steuerung zu benutzen, da der Bus-Abschluss sich am linken Ende des Überrahmens befindet. Am äußersten rechten Ende ist die Netzkarte mit Netzschalter und Betriebsspannungsanzeigen fest installiert.
Die Frontplattenbreite für eine Steckkarte ist üblicherweise 20 mm, es stehen jedoch auch 40 und 50 mm Frontplatten zur Verfügung.
Achtung:
Es wird dringend empfohlen, die Frontplatten der Steckkarten
mit dem Überrahmen zu verschrauben zur Vermeidung von
Betriebsstörungen. Bitte die Schrauben nicht gewaltsam
anziehen, da dies zur Zerstörung der Gewinde im Überrahmen
führt. Schrauben von min. 10mm Länge verwenden, sonst besteht
ebenfalls die Gefahr der Zerstörung der Gewinde.
Abb. 2.2.0.1 Routing-Überrahmen
Steckplatz
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+
| | | | | | | | | | | | | | | | | | |RS|RA|SV|
| | | | | | | | | | | | | | | | | | | | | |
| | | | | | | | | | | | | | | | | | | | | |
| | | | | | | | | | | | | | | | | | | | | |
+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+
0 0 1 1 2 2 3 3 4 4 5 5 6 6 7 7 7 7 7 7
Steckplatzkodierung
RS = Routingsteuerung
RA = Rechneranpassung
SV = Spannungsversorgung
Nächste: Rechneranpassung (RAP) [Inhalt]
| • Aufgabe | ||
| • Bedienungselemente, Anzeigen |
Nächste: Bedienungselemente (RST), Nach oben: Routing-Steuerung (RST) [Inhalt]
Die Routing-Steuerung koordiniert die Eingabe der Daten von den bis zu acht anschließbaren Eingabekanälen. Ein Eingabekanal besteht aus den drei funktionellen Gruppen:
Siehe Aufbau des Routing.
Siehe Komponenten und Schnittstellen.
Die Routing-Steuerung ist mit zwei alternativ laufenden Scannern unterschiedlicher Priorität ausgestattet, mit denen die Eingabekanäle abgefragt werden. Dadurch besteht die Möglichkeit, einen oder mehrere Eingabekanäle mit Vorrang vor den anderen abfragen zu lassen. Dazu müssen diese Eingabekanäle einen Vorrangwunsch bei der Routing-Steuerung anmelden, sobald sie bereit sind ein Datenwort zu übertragen. Der jeweils ruhende Scanner behält seine Position bei, so dass er an der unterbrochenen Stelle weiterlaufen kann.
Um verkürzte Scanner-Umläufe zu ermöglichen, sind die Scanner-Adressen in vier Gruppen zusammengefasst, die in Einer-, Zweier- oder Vierer-Kombinationen durch einen Jumper aktiviert werden können. Die Scanner-Adressen werden stets in einer Reihenfolge durchlaufen in der sich höchstens 2 Bits gleichzeitig ändern, um Störungen auf dem Routing-Bus zu minimieren (Siehe Routing-Steuerung.).
Es ist zu beachten, dass die verschiedenen Eingabekanäle von der Routing-Steuerung nicht nach einem ’first in - first out’ Verfahren bearbeitet werden, sondern durch einen Scanner reihum abgefragt werden. Dies kann zur Folge haben, dass die einzelnen Eingabekanäle nicht in der Reihenfolge zum Rechner übertragen werden, in der sie zur Übertragung bereit waren. Die damit zusammenhängenden Probleme der Verkoppelung von Datenquellen z.B. bei Koinzidenzexperimenten sind jedoch berücksichtigt (Siehe Kopplungskarte (KPL).).
Ein Stop der Routing-Steuerung kann vom Rechner her erfolgen oder über einen Schalter auf der Frontplatte. Beide bewirken ein Anhalten der Daten-Scanner. Ferner wird der Stop den Eingabekanälen mitgeteilt und über die Interface-Steuerung den Datenquellen.
Die Routing-Steuerung arbeitet eng mit der Rechneranpassungs-Karte zusammen und steckt deshalb direkt links neben ihr.
Vorige: Aufgabe (RST), Nach oben: Routing-Steuerung (RST) [Inhalt]
Schalter: Run/Stop
In Stellung Stop wird die Abfrage der Eingabekanäle angehalten
durch Stoppen des Daten-Scanners. An die Eingabekanäle geht
ein Stopsignal. Der Schalter ist disjunktiv (ODER) verknüpft
mit dem Stop vom Rechner.
Anzeige: Run
Wenn weder vom Rechner noch durch den Schalter Run/Stop ein
Stop erfolgt, d.h. die Routing-Steuerung läuft, so leuchtet
die Anzeige Run.
Anzeige: Ready
Solange die Routing-Steuerung das Data Ready (ReadyB) eines
Eingabekanals bearbeitet, leuchtet die Anzeige Ready.
Anzeige: Vorrang
Solange die Routing-Steuerung im Vorrangmodus arbeitet,
leuchtet die Anzeige Vorrang.
Jumper: Group 0 1 2 3
Selektion von Scanner-Gruppen 0 1 2 3.
Erlaubte Kombinationen von Gruppen sind
0, 1, 2, 3, 0-1, 0-2, 1-3, 2-3, 0-1-3-2.
Bei unzulässigen Kombinationen, und falls kein Jumper gesetzt ist,
wird 0-1-3-2 ausgeführt.
Nächste: Interface-Steuerung (IFS), Vorige: Routing-Steuerung (RST) [Inhalt]
| • Aufgabe | ||
| • Bedienungselemente, Anzeigen |
Nächste: Bedienungselemente (RAP), Nach oben: Rechneranpassung (RAP) [Inhalt]
Die Rechneranpassungs-Karte hat die Aufgabe aus den Daten- und Kennungsbits auf dem Bus ein Datenwort zusammenzustellen, es in Fifos zwischenzuspeichern und dann an den Rechner zu übertragen. Darüberhinaus enthält die Rechneranpassungs-Karte Sender, Empfänger und eventuell Pegelwandler für die Dialog-Signale zwischen dem Rechner und dem Routing.
Die Verbindung zum Rechner erfolgt über ein max. 40m langes 50-poliges Flachbandkabel. Kurze Kabellängen sind zu bevorzugen da die Länge in die Übertragungsgeschwindigkeit eingeht und kürzere Kabel störungssicherer sind.
Für Testzwecke am Routing kann das 50-polige Verbindungskabel zum Rechner abgezogen werden. Die Rechneranpassung nimmt dann dem Routing die Daten mit höchstmöglicher Geschwindigkeit ab (und wirft sie weg).
Bisher wurden drei Anpassungen an verschiedene Host-Rechner realisiert:
Aktuell ist die VME - Anpassung, die zusammen mit dem rechnerseitigen
Interface eine Schnittstelle zu dem Industry Pack Standard darstellt.
Für diesen IP-Standard werden Carrier-Boards für eine Anzahl
weiterer Plattformen (z.B. PC) angeboten, so dass ein Anschluss
des Data-Routing an einen anderen Rechnertyp ohne großen
Aufwand möglich ist.
Die TR86- und PDP11-Anpassungen wurden inzwischen ausgemustert.
Ihre Beschreibung finden Sie bei den ’Oldies’.
Die sogn. Silena-Änderung wurde in die aktuelle VME-Rechneranpassung nicht mit übernommen, sondern es wird vorausgesetzt, dass eine entsprechende Änderung auf allen Silena-Interface-Karten vorgenommen ist.
Die Rechneranpassungs-Karte arbeitet sehr eng mit der Routing-Steuerung zusammen und steckt deshalb direkt rechts neben ihr.
Vorige: Aufgabe (RAP), Nach oben: Rechneranpassung (RAP) [Inhalt]
Die Rechneranpassungskarte besitzt keine Bedienungselemente. Auf dem Board (von außen nicht sichtbar) befindet sich eine grüne LED zum Anzeigen einer aktiven Verbindung mit dem Rechner und eine rote LED zum Anzeigen eines Fifo-Errors.
Nächste: Kopplungskarte (KPL), Vorige: Rechneranpassung (RAP) [Inhalt]
| • Aufgabe | ||
| • Bedienungselemente, Anzeigen |
Nächste: Bedienungselemente (IFS), Nach oben: Interface-Steuerung (IFS) [Inhalt]
Die Interface-Steuerung stellt eine standardisierte Karte zwischen der Routing-Steuerung und den Datenquellen dar. Im Zusammenspiel mit der Routing-Steuerung wickelt sie die Routing-Logik ab und bietet den Datenquellen eine bequeme Schnittstelle, die den Anschluss von Datenquellen wesentlich erleichtert. Ferner ist sie zur Lifetime-Messung, zur Eingabe von Daten im Vorrangmodus und zur Eingabe von gekoppelten Daten (Koinzidenz-Experimente) vorbereitet. Zum Anschluss von Datenquellen sind, je nach Komplexität der Aufgabe, noch ein oder mehrere Quellen-Interface-Karten notwendig, die im einfachsten Falle nur Pegelwandler und Bus-Leitungstreiber enthalten.
Zur Verständigung mit den Quellen-Interface-Karten baut die IFS-Karte nach rechts einen Privat-Bus (IFS-Bus) auf. Die Quellen-Interface-Karten müssen deshalb stets rechts von der IFS-Karte stecken. Die Frontplatten der so miteinander kommunizierenden Karten müssen fest mit dem Überrahmen verschraubt sein, um eine gute Masseverbindung von den Karten zur Frontplatte herzustellen. Fehlt die Verschraubung so kann dies zu schwerwiegenden Betriebsstörungen führen, weil die Karten wie die Kondensatorplatten eines gedämpften Oszillators gegeneinander schwingen.
Es existieren zwei Varianten (IFS und IFS1) der Interface-Steuerung, die sich in ihren Funktionen nicht wesentlich unterscheiden. Bei der älteren (IFS) sind die Konfigurationsbrücken als Lötbrücken (statt Steckbrücken) ausgeführt und unbeschriftet und auf der Frontplatte fehlt die Anzeige für den Vorrangbetriebsmodus.
Vorige: Aufgabe (IFS), Nach oben: Interface-Steuerung (IFS) [Inhalt]
Stop/Run/LFT (Schalter)
Schalter für den Betriebsmodus.
LFTQ = BusyQ\ * GateQ(Option) * (K2 * LFTK\)\
Die Option wird eingeschaltet durch Stecken der Brücke LFT\= By+G statt By. Immer, wenn dieses Signal LFTQ ansteht wird der interne Lifetime-Zähler mit 1MHz Takt hochgezählt. Sobald auf diese Weise 1s bzw. 0.1s (Brücke: 1s/0.1s) Lifetime zusammengekommen sind, wird ein Datenwort übertragen, das zur Unterscheidung neben der normalen Quellenkennung noch das Lifetime-Bit (Siehe »Rechneranpassung«.) gesetzt hat. Alle Daten-Bits sind null. Diese Funktion der IFS-Karte erlaubt totzeitkorrigierte Messungen.
Da die Totzeitsignale intern mit einem 1MHz-Takt abgefragt werden, kann es zu Fehlmessungen der Lifetime kommen, wenn die Totzeitsignale phasensynchron mit dem internen 1MHz-Takt und in der Größenordnung der Taktperiode sind. Für völlig vom internen Takt unabhängige Totzeitsignale sollten hingegen vom Schaltungsentwurf her auch kürzere als 1us richtig verarbeitet werden, auf einer statistischen Basis, in dem sie mal einen Takt durchlassen und mal nicht (hab’ dies aber bis jetzt noch nicht überprüft!).
Achtung: Aus Kostengründen sind nicht alle IFS-Karten mit den für die LFT-Messung notwendigen Bausteinen (SAJ141) bestückt.
Frei/K1/K2 (Schalter)
Sollen mehrere Datenquellen gekoppelt übertragen werden (z.B.
bei Koinzidenz-Experimenten), so wird über diesen Schalter
entschieden in welcher Weise die zugehörige Datenquelle an der
Kopplung teilnimmt. Detailierte Information ist der
Beschreibung der Kopplungskarte zu entnehmen (Siehe Kopplungskarte (KPL).).
GateQ: (TTL-Eingang)
Über diesen Eingang kann die Datenquelle auf- und
zugegatet werden. Bei Betrieb im Modus K2 erfolgt eine
Verknüpfung mit dem Signal GateK und dem Kopplungssignal
(siehe GateK).
High oder offener Eingang: Gate offen
GateK: (TTL-Eingang)
Über diesen Eingang kann, um spezielle Zeitbedingungen zu
realisieren, das Kopplungssignal (siehe Modus K1, K2)
extern zugeführt werden. Es wird mit dem internen
Kopplungssignal (KoppK), das von der Kopplungskarte
geliefert wird, konjunktiv (UND) verknüpft. Für den
Kopplungsmodus K2 wird das Ergebnis noch mit dem Eingang
GateQ konjunktiv verknüpft und als Gate-Signal
(GateSQ) an die Datenquelle übergeben.
High oder offener Eingang: Gate offen
GateSQ= GateQ * (K2\ + K2 * KoppK * GateK)
Out: (TTL-Ausgang)
Je nach Konfiguration der IFS-Karte (Steckbrücke: Gate/By)
kann über diesen Ausgang das Busy-Signal der Datenquelle
oder das Gate-Signal für die Datenquelle beobachtet
werden.
High: Quelle Busy/Gate offen
Run bzw. R/S: (LED-Anzeige)
Run/Stop-Anzeige
LED leuchtet: IFS-Karte läuft
B bzw. By: (LED-Anzeige)
Busy Anzeige
LED leuchtet: Datenquelle meldet Busy
VR: (LED-Anzeige; nur IFS1)
Vorranganzeige
LED leuchtet: Die Datenquelle arbeitet im Vorrangmodus
4 2 1: (LED-Anzeige)
Anzeige der Steckplatzadresse.
Zur Unterscheidung der verschiedenen Datenquellen wird dem
Datenwort die Steckplatzadresse als Quellenkennung
mitgegeben. Da im allgemeinen beim Start eines
Messprogrammes die Quellenkennung angegeben werden muss,
wird die Steckplatzadresse von der IFS-Karte angezeigt.
LED leuchtet: Bit der angegenbenen Wertigkeit ist gesetzt.
1s / 0.1s: (Jumper)
Zeitbasis für die Übertragung des Lifetime-Datenwortes (s.o.).
Out = Gate / Busy: (Jumper)
Beschaltung der ’Out’ BNC-Buchse mit Gate- oder Busy-Signal (s.o.).
LFT = Busy / Busy & Gate: (Jumper)
Option für die Lifetime-Messung (s.o.).
Nächste: Test-Datenquelle (TST), Vorige: Interface-Steuerung (IFS) [Inhalt]
| • Aufgabe | ||
| • Funktion | ||
| • Bedienungselemente |
Nächste: Funktion (KPL), Nach oben: Kopplungskarte (KPL) [Inhalt]
Bei manchen Experimenten (z.B. Koinzidenzexperimente) werden zu einem Ereignis mehrere Datenworte erzeugt, die nach ihrer Übertragung für die Software als zusammengehörig erkenntlich sein müssen. Diesem Zweck dient die Kopplungskarte.
Nächste: Bedienungselemente (KPL), Vorige: Aufgabe (KPL), Nach oben: Kopplungskarte (KPL) [Inhalt]
Die Kopplungskarte arbeitet wie eine normale Datenquelle, d.h. sie benötigt eine Standard-Interface-Steuerung (IFS-Karte). Der Schalter Frei/K1/K2 auf der IFS-Karte wird dabei außer Betrieb gesetzt, so dass die Kopplungskarte im Modus "Frei" läuft.
Die Kopplungskarte ist Ausgangspunkt für einen Privat-Bus, den Kopplungs-Bus, der sich nach links fortsetzt bis entweder ein Steckplatz frei ist, eine weitere Kopplungskarte auftritt, oder aber eine Karte steckt, die den Kopplungs-Bus unterbricht.
Die Kopplung wird gestartet über den BNC-Eingang Start auf der Kopplungskarte. Nach erfolgtem Start geht die Kopplung sofort in den Zustand Busy (BusyK). Das Busy steht solange an wie irgendeine der gekoppelten Quellen Busy (BusyQi) an die Kopplung meldet. Die Übertragung des Kopplungswortes trägt ihr Busy (BusyQK) wie eine normale Quelle bei. Zur Überbrückung der Reaktionszeiten der verschiedenen gekoppelten Quellen geht die Kopplung mit dem Start in eine interne Wartephase (Wait) einstellbarer Dauer. Diese Wartephase trägt ebenfalls zum Busy der Kopplung bei:
BusyK = Wait + BusyQK + Sum(i,BusyQi)
Eine eindeutige Zusammenfassung der gekoppelten Daten ist nur gewährleistet, wenn BusyK lückenlos ansteht bis alle Quellen ihre Daten registriert und abgeliefert haben. Durch geeignete Einstellung der Wartephase sollte dies immer möglich sein.
Das Signal Wait steht den gekoppelten Quellen über den Kopplungs-Bus unter dem Namen Kopplungssignal (KoppK) zu Synchronisationszwecken (Aufgaten der Quellen) zur Verfügung (Siehe Interface-Steuerung (IFS).).
Je nach eingestelltem Start-Modus unterliegt der Start der Kopplung unterschiedlichen Bedingungen:
Nach erfolgtem Start meldet die Kopplungskarte einen vorrangigen Bearbeitungswunsch bei der Routing-Steuerung an zur Übertragung eines Datenwortes, dem Kopplungswort. Durch entsprechendes Timing auf den IFS-Karten ist sichergestellt, dass das Kopplungswort auf jeden Fall vor den Datenwörtern der gekoppelten Quellen übertragen wird. Diese folgen in beliebiger Reihenfolge je nach Bearbeitungszeit in den Quellen und Stand des Routing-Scanners. Nicht alle Datenquellen müssen notwendigerweise Daten übertragen, sondern nur die, die ein Ereignis erkannt haben. Die Synchronisierung der Software erfolgt durch das Kopplungswort am Anfang eines Blockes von gekoppelten Daten.
Solange sich die Kopplung im Zustand ’Busy’ befindet, werden alle abgewiesenen Startversuche im ’Pile-up-Zähler’ registriert. Mit jeder Datenübertragung wird im Kopplungswort der Zählerstand übertragen und gleichzeitig gelöscht. Falls mehr als 255 Pile-ups auftreten, bleibt der Zähler bei 255 stehen.
Das Kopplungswort ist wie ein normales Datenwort aufgebaut. Das Kopplungs-Bit ist null. In den Daten-Bits 0-7 steht der Inhalt des Pile-up-Zählers.
Für jede am Kopplungs-Bus angeschlossene Datenquelle kann der Kopplungsmodus individuell gewählt werden über den Schalter Frei/K1/K2 auf der IFS-Karte.
Im Modus Frei nimmt die Quelle an der Kopplung nicht teil, sie läuft frei. Das von der Kopplung gelieferte Kopplungssignal (KoppK) wird nicht berücksichtigt und das Busy der Quelle wird nicht an die Kopplung gemeldet.
Im Modus K1 läuft die Quelle im wesentlichen frei. Falls jedoch der Beginn der Busy-Meldung der Quelle in das von der Kopplungskarte vorgegebene Kopplungssignal fällt, wird in der Kennung des Datenwortes das Kopplungs-Bit gesetzt. Auf diese Weise können z.B. koinzidente und nicht koinzidente Ereignisse mit dem gleichen ADC aufgenommen werden. Für Ereignisse, die das Setzen des Kopplungs-Bits zur Folge haben, wird das Busy der Quelle an die Kopplung gemeldet. Dies verhindert einen weiteren Start der Kopplung bevor die Quelle mit ihrer Bearbeitung völlig fertig ist und garantiert, dass Datenworte verschiedener Koinzidenzereignisse sauber getrennt werden. Für höhere Zählraten ist der Modus K1 nicht gut geeignet, da mit wachsender Zählrate die Wahrscheinlichkeit zunimmt, dass eine der gekoppelten Quellen noch durch ein nicht koinzidentes Ereignis busy ist. Der Start der Kopplung würde in diesem Falle zwar erfolgen, aber das Datenwort der betreffenden Quelle würde bei der Koinzidenz fehlen.
Im Modus K2 können die Quellen nur während der Dauer des Kopplungssignals Ereignisse registrieren. Das Kopplungs-Bit ist immer gesetzt, Busy wird stets an die Kopplung gemeldet. Es werden also nur koinzidente Ereignisse registriert. Ein nicht-koinzidenter Untergrund belastet das System nicht durch Totzeit.
Es ist zu beachten, dass durch die unterschiedliche Wirkungsweise des Kopplungssignals in den Modi K1 und K2 sich für das Kopplungssignal ein unterschiedliches Timing ergibt. Der Unterschied besteht darin, dass im Modus K1 das Busy der Quelle während des Kopplungssignals zum Setzen des Kopplungs-Bits führt und im Modus K2 die Quelle vom Kopplungssignal aufgegated wird, was offensichtlich dem Busy zeitlich vorausgehen muss.
Vorige: Funktion (KPL), Nach oben: Kopplungskarte (KPL) [Inhalt]
Start: (TTL-Eingang)
Durch die positive Flanke eines Signals an diesem Eingang
wird die Kopplung gestartet, falls sie nicht gerade busy
ist.
Int/Ext: (Schalter)
In Stellung Int wird die Dauer der Wartephase intern
erzeugt. Sie ist durch ein Potentiometer auf der
Frontplatte im Bereich von etwa 1-100 us einstellbar.
In Stellung Ext wird die Dauer der Wartephase durch das
Startsignal vorgegeben (high: Wartephase).
Out: (TTL-Ausgang)
Über diesen Ausgang kann das Signal Wait der Wartephase
abgenommen werden.
norm./spez.: (Steckbrücke auf der Karte)
Über diese Steckbrücke auf der Kopplungskarte kann der
Startmodus (normal bzw. spezial) eingestellt werden.
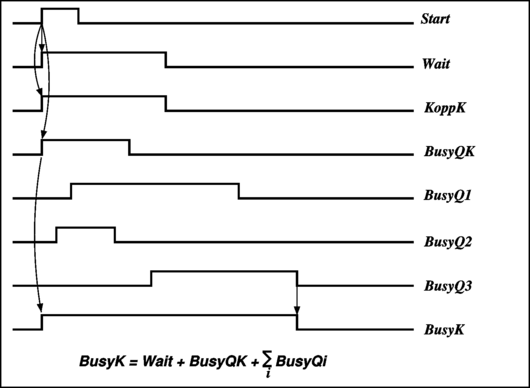
Abb. 3.4.3.1 Timing von gekoppelten Datequellen
Nächste: Bus-Signal Anzeige (BUS), Vorige: Kopplungskarte (KPL) [Inhalt]
| • Aufgabe | ||
| • Bedienungselemente |
Nächste: Bedienungselemente (TST), Nach oben: Test-Datenquelle (TST) [Inhalt]
Die Testdatenquelle erzeugt 16-Bit Datenworte zu Testzwecken. Wahlweise liefert sie mit jedem Scannerzyklus ein Datenwort ab, die Daten werden also mit der maximal möglichen Geschwindigkeit übertragen, oder die Übertragung wird durch einen externen Takt gesteuert.
Vorige: Aufgabe (TST), Nach oben: Test-Datenquelle (TST) [Inhalt]
set/count/reset: (Schalter)
ext/int: (Schalter)
prio/norm: (Schalter)
inc/alt/dec: (Schalter)
Ext-Takt: (BNC-Buchse, TTL-Eingang)
Takteingang zum externen Anstoßen einer Übertragung
(positive Flanke).
Nächste: Routing-Funktionsüberwachung (Alarm), Vorige: Test-Datenquelle (TST) [Inhalt]
Die Anzeigekarte übernimmt vom Routing-Bus die Daten- und Kontroll-Bits und zeigt sie über LED’s auf der Frontplatte an.
Anzeige:
DO ...D15 Daten-Bits
frei
frei
frei
frei
Kopp-Bit Kopplungs-Bit
LFT-Bit Lifetime-Bit
Nächste: Totzeitanzeige, Vorige: Bus-Signal Anzeige (BUS) [Inhalt]
Es werden die beiden Scanner-Takte TV und TN der Routing-Steuerung (Siehe Routing-Steuerung.) überwacht, und falls sie länger als ca. 0.5s ausbleiben, ohne dass das Routing gestoppt ist, wird Alarm gegeben. Der Alarm wird beim nächsten Scanner-Schritt wieder aufgehoben.
Anzeige (rote LED): leuchtet bei Alarm
BNC-Ausgänge für High- und Low-Signale bei Alarm
(2.5kOhm nach +5V; 330Ohm nach 0V)
Vorige: Routing-Funktionsüberwachung (Alarm) [Inhalt]
Diese Karte bildet ein zeitliches Mittel über ein digitales Totzeitsignal (TTL-Pegel) und zeigt die Totzeit auf einem Drehspulinstrument mit 100er-Skala an. Die Karte erwartet das Totzeitsignal auf der P-Bus-Leitung 28a von ihrer direkten linken Nachbarkarte. Diese muss deshalb auf 28c ein entsprechendes Signal verdrahtet haben. Für die üblichen Interface-Karten ist 28a-28c gebrückt, so dass das Signal BusyQ als Totzeitsignal zur Verfügung steht.
Nächste: Spezielle Interface-Karten, Nach oben: Top [Inhalt]
Nächste: Silena-ADC-Interface, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe, Funktion | ||
| • Signalbeschreibung |
Nächste: Signalbeschreibung (D16), Nach oben: 16-Bit-Digitaleingabe [Inhalt]
Die Digitaleingabe bietet eine universelle Schnittstelle zur Eingabe von 16 Daten-Bits. Sie ist so ausgelegt, dass Laben ADC’s direkt angeschlossen werden können. Die Verbindung zur Datenquelle wird durch einen 37-poligen ERNI-Stecker hergestellt. Die Kabellänge sollte 1.5 m nicht überschreiten. Alle von der Datenquelle kommenden Leitungen sind mit 1 kOhm Pull-up-Widerständen versehen. Die Leitungen zur Datenquelle können mit max. 15 mA bei high Pegel und 24 mA bei low belastet werden.
Achtung:
Dieses Interface wurde früher auch zum Anschluss von Silena-ADCs
verwendet.
Durch einen Timer auf der alten Rechneranpassung war dafür
gesorgt, dass AcceptedB mindestens
1us lang ist. Diese Verlängerung (Silena-Änderung) war
notwendig, da der Silena-ADC eine (im Manual nicht spezifizierte)
Zeit von ca. 0.5us für ein Reset benötigt.
Diese Silena-Änderung wurde in die VME-Rechneranpassung nicht mit
übernommen, deshalb ist dieses Interface nicht mehr zum Anschluss
von Silena-ADCs geeignet. Bitte das spezielle Silena-ADC-Interface
verwenden.
Vorige: Funktion (D16), Nach oben: 16-Bit-Digitaleingabe [Inhalt]
Mit Stop wird die Datenquelle gestoppt und gecleart.
Mit Ready zeigt die Datenquelle an, dass sie bereit ist ein Datenwort zu übergeben.
Mit Request wird die Datenquelle aufgefordert ihre Daten auf die Datenleitungen zu geben. Prinzipiell können die Daten immer an den Datenleitungen anstehen. Falls jedoch Pegeländerungen auf vielen Datenleitungen gleichzeitig auftreten, führt dies unweigerlich zu Störungsspitzen auf den Steuerleitungen, die zu Fehlfunktionen führen können (z.B. verfrühte Anmeldung von Ready).
Mit Accepted zeigt die Digitaleingabe an, dass die Daten übernommen wurden. Je nach Auslastung des Rechners kann das Accepted u.U. recht lange auf sich warten lassen. Normalerweise löscht die Datenquelle mit Accepted das anstehende Ready, notwendig ist dies jedoch nicht, falls beim nächsten Routing-Zyklus sofort ein weiteres Datenwort übertragen werden soll.
Mit Busy zeigt die Datenquelle an, dass sie beschäftigt ist mit der Erzeugung eines Datenwortes. Busy kann je nach Quelle mit der Vorder- oder Rückflanke von Accepted oder sonst wann verschwinden. Es wird bei einer eventuellen Totzeitmessung verarbeitet (Siehe Interface-Steuerung (IFS).).
Da je Datenleitung ein Strom von ca. 5 mA fließt, ist für eine Masseleitung von ausreichendem Querschnitt zu sorgen für die Rückführung der 16 * 5 mA = 80 mA.
Tab. 4.1.2.1 Schnittstelle zur Datenquelle
37 poliger ERNI-Stecker
Die nicht aufgeführten Anschlüsse sind unbelegt.
Signale, die mit '^' beginnen, werden von der Digitaleingabe erzeugt.
Signal ERNI-Pin
Daten-Bit 0\ 19
Daten-Bit 1\ 18
Daten-Bit 2\ 17
Daten-Bit 3\ 16
Daten-Bit 4\ 15
Daten-Bit 5\ 14
Daten-Bit 6\ 13
Daten-Bit 7\ 12
Daten-Bit 8\ 11
Daten-Bit 9\ 10
Daten-Bit 10\ 9
Daten-Bit 11\ 8
Daten-Bit 12\ 7
Daten-Bit 13\ 6
Daten-Bit 14\ 5
Daten-Bit 15\ 4
Ready\ 3
^Request 20
^Accepted 23
^Stop\ 22
Busy\ 2
^Gate 1
Masse
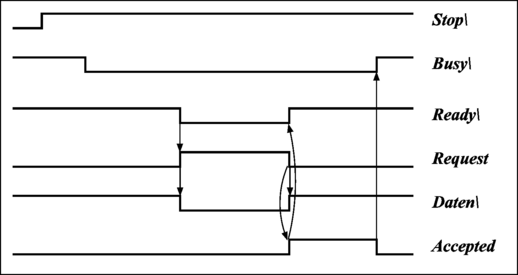
Abb. 4.1.2.2 Timing zwischen Digital-Eingabe und Datenquelle
Nächste: Uhr/Zaehler, Vorige: 16-Bit-Digitaleingabe, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe, Funktion | ||
| • Signalbeschreibung |
Nächste: Signalbeschreibung (Silena), Nach oben: Silena-ADC-Interface [Inhalt]
Das Silena-ADC-Interface ist eine modifizierte 16-Bit-Digitaleingabe. Es berücksitigt die spezielle Steckerbelegung des Silena-ADCs, so dass die Kabelverbindung mit einem 37-poligen Flachbandkabel hergestellt werden kann. Ferner berücksichtigt es den Umstand, dass der Silena-ADC ein unterschiedlich langes (bis zu 500ns, nicht im Manual spezifiziert) Accepted-Signal benötigt.
Selbstverständlich kann diese Interface-Karte auch als universelle Schnittstelle zur Eingabe von 16 Daten-Bits verwendet werden. Die Verbindung zur Datenquelle wird durch einen 37-poligen ERNI-Stecker hergestellt. Die Kabellänge sollte 1.5 m nicht überschreiten. Alle von der Datenquelle kommenden Leitungen sind mit 1 kOhm Pull-up-Widerständen versehen. Die Leitungen zur Datenquelle können mit max. 15 mA bei high Pegel und 24 mA bei low belastet werden.
Vorige: Funktion (Silena), Nach oben: Silena-ADC-Interface [Inhalt]
Mit Stop wird der ADC gestoppt und gecleart.
Mit Ready zeigt der ADC an, dass er bereit ist ein Datenwort zu übergeben.
Request ist nicht verdrahtet, der Silena-ADC gibt deshalb seine Daten immer auf die Datenleitungen.
Mit Accepted zeigt das Interface an, dass die Daten übernommen wurden. Accepted steht so lange an bis das Ready-Signal verschwindet. Dieses Verhalten von Accepted ist notwendig, da der Silena-ADC ein im Manual nicht spezifiziertes, unterschiedlich langes (bis 500ns) Accepted benötig.
Mit Busy zeigt der ADC an, dass er beschäftigt ist mit der Erzeugung eines Datenwortes. Es wird bei einer eventuellen Totzeitmessung verarbeitet (Siehe Interface-Steuerung (IFS).).
Da je Datenleitung ein Strom von ca. 5 mA fließt, ist für eine Masseleitung von ausreichendem Querschnitt zu sorgen für die Rückführung der 16 * 5 mA = 80 mA.
Tab. 4.2.2.1 Schnittstelle zum Silena ADC
37 poliger ERNI-Stecker
Die nicht aufgeführten Anschlüsse sind unbelegt.
Signale, die mit '^' beginnen, werden vom Interface erzeugt.
Signal ERNI-Pin
Daten-Bit 0\ 1
Daten-Bit 1\ 2
Daten-Bit 2\ 3
Daten-Bit 3\ 4
Daten-Bit 4\ 5
Daten-Bit 5\ 6
Daten-Bit 6\ 7
Daten-Bit 7\ 8
Daten-Bit 8\ 9
Daten-Bit 9\ 10
Daten-Bit 10\ 11
Daten-Bit 11\ 12
Daten-Bit 12\ 13
Daten-Bit 13\ 18
Daten-Bit 14\ 37
Daten-Bit 15\ 19
Ready\ 21
^Request nicht verdrahtet
^Accepted 22
^Stop\ 20
Busy\ 15
^Gate 35
Masse 36
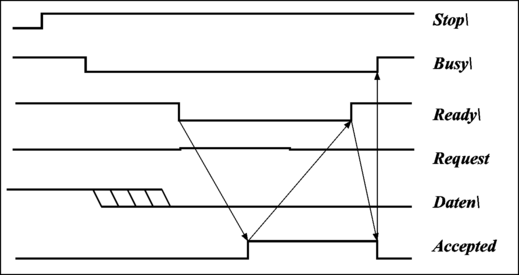
Abb. 4.2.2.2 Timing zwischen Interface und ADC
Nächste: Up/Down-Zaehler, Vorige: Silena-ADC-Interface, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe | ||
| • Bedienungselemente | ||
| • Beispiel: Lebensdauermessung mit Totzeitkorrektur |
Nächste: Bedienungselemente (UHR), Nach oben: Uhr/Zaehler [Inhalt]
Die Uhrkarte enthält eine 16 Bit Relativzeituhr, deren Zeitregister während des Betriebes (on flight) abgefragt werden kann. Sie kann mit einem internen quarzstabilisierten Takt von 10 MHz oder extern mit bis zu 4 MHz betrieben werden. Der externe Betrieb ist gleichbedeutend mit einem Betrieb als Zähler. Beim Betrieb als Uhr besteht die Möglichkeit parallel zur eigentlichen Messungen eine zeitabhängige Totzeitmessung laufen zu lassen, um eine nachträgliche rechnerische Totzeitkorrektur zu ermöglichen. Bei Kopplung der Uhr mit anderen Datenquellen kann die gemeinsame Totzeit der gekoppelten Quellen gemessen werden.
Nächste: Beispiel (UHR), Vorige: Aufgabe (UHR), Nach oben: Uhr/Zaehler [Inhalt]
Int/Ext: (Schalter)
In Stellung Int wird die Uhr mit einem internen
quarzstabilisierten 10 MHz Takt betrieben.
In Stellung Ext kann die Uhr mit einem externen Takt bis
maximal 4 MHz betrieben werden.
Takt: (TTL-Eingang)
Über diesen Eingang kann der Uhr ein externer Takt bis zu
4 MHz zugeführt werden. Dieser wird auf den internen 10
MHz Takt aufsynchronisiert. Die positive Flanke taktet die
Uhr. Sie wird durch die Synchronisation innerhalb 100 ns
unscharf. Taktbreite und -pause müssen mindestens 125 ns
betragen.
Reset: (TTL-Eingang)
Über diesen Eingang kann die Uhr auf Null gesetzt werden.
High oder offener Eingang: Reset
min. Pulsbreite: 200 ns
Uhr: (TTL-Eingang)
Über diesen Eingang erfolgt die Abfrage der Uhr. Die
positive Flanke des Abfragesignals veranlasst die Übernahme
des Inhaltes des Uhrregisters in ein Pufferregister, wo es
bis zur Übertragung zum Rechner gespeichert wird. Die
Abfrage kann asynchron zum Takt erfolgen. Das
Abfragesignal wird auf den internen 10 MHz Takt
aufsynchronisiert. Von der Abfrage bis zur Übertragung des
Datenwortes geht die Uhrkarte in den Zustand Busy und ist
für weitere Abfragen gesperrt. Dieser Eingang ist gatebar
über die Eingänge GateQ und GateK auf der IFS-Karte.
LFT: (TTL-Eingang)
Über diesen Eingang kann zeitabhängig die ’Lifetime’ der
Uhrkarte und eventuell gekoppelter Datenquellen gemessen
werden. Er hat im wesentlichen die gleiche Wirkung wie
eine Abfrage über den Eingang Uhr mit folgenden
Unterschieden:
Die Gate-Signale wirken nicht auf diesen Eingang (änderbar). Das Datenwort hat zur Unterscheidung zusätzlich das Lifetime-Bit gesetzt. Die Abfrage ist gesperrt, wenn die IFS-Karte keine Lifetime (LFTQ) meldet.
Es wird zur Lifetime-Messung die gleiche Lifetime (LFTQ) verwendet wie auf der IFS-Karte. Diese Lifetime enthält konjunktiv die negierte Totzeit der Uhrkarte, das Signal GateQ der IFS-Karte (Option), und im Kopplungsmodus K2 die Lifetime-Meldung der Kopplung
LFTQ = BusyQ\ * GateQ(Option) * (K2\ + LFTK)
Achtung: Wird als externer Takt und zur Abfrage der Uhr (Uhr bzw. LFT) das gleiche Signal verwendet, so wird durch die Aufsynchronisierung der externen Signale auf den internen 10 MHz Takt mal der eine oder der andere Eingang früher sein. Soll ein Eingang mit Sicherheit vor dem anderen Eingang zum Zuge kommen, so müssen sie mindestens als Abstand die Taktbreite (100 ns) plus interne Laufzeitunterschiede (<50 ns) d.h. ca. 150 ns haben.
Die gleiche Zeitdifferenz ist einzuhalten zwischen einer Abfrage der Uhr und einem nachfolgenden Reset-Signal, um mit Sicherheit ein Auslesen vor dem Löschen zu erreichen.
Vorige: Bedienungselemente (UHR), Nach oben: Uhr/Zaehler [Inhalt]
Über den Eingang Uhr wird der Zeitpunkt des Auftretens der beobachteten Ereignisse zum Rechner übertragen. Die Software erzeugt daraus ein Zeitspektrum, in dem sie die Zeit als Kanaladresse interpretiert und wie im MCA-Mode im betreffenden Kanal ein ’addiere 1’ ausführt.
Über den Eingang LFT wird ein fester Takt nicht zu hoher Frequenz (damit nicht zu hohe zusätzliche Totzeit entsteht) eingegeben. Auf die gleiche Weise wie oben wird ein LFT-Spektrum erzeugt, aus dem für jeden Zeitpunkt die zugehörige Lifetime der Messung entnommen werden kann.
Nächste: 12-Bit ADC, Vorige: Uhr/Zaehler, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe | ||
| • Funktion | ||
| • Eingänge (BNC-Buchsen) |
Nächste: Funktion (UDZ), Nach oben: Up/Down-Zaehler [Inhalt]
Diese Zählerkarte besitzt ein 16 Bit breites Zählerregister d.h. es kann 65535 Ereignisse registrieren. Bei Überlauf in Vorwärtsrichtung springt es auf 0 und in Rückwärtsrichtung auf 65535. Der Überlauf wird nicht angezeigt, es ist deshalb ggf. das Vorschalten eines Untersetzers zu empfehlen zur Vermeidung von Überläufen. Durch eine einfache Umverdrahtung sind jedoch auch (gekennzeichnete) Varianten entstanden, die bei Überlauf anhalten. Die Auflösungsgrenze für die Zählimpulse liegt bei ca. 200ns, d.h. 5 MHz max. Zählerfrequenz. Sollen geringere Zählimpulsabstände verarbeitet werden, bei statistisch ankommenden Signalen kann dies bereits bei geringeren Zählraten der Fall sein, so ist ein Untersetzer vorzuschalten (z.B. mit den Bausteinen 74196 (50MHz) oder 74S196 (100MHz)). Der Zählerstand kann asynchron zum Zählvorgang, d.h. ohne das Zählen zu beeinflussen, abgefragt werden. Sowohl der Zählereingang (Count) als auch der Eingang für das Auslesesignal (Read) können jeweils über Gate-Signale gesteuert werden. Alle Eingänge sind bis ca. 10V Dauerpegel gegen Überspannung geschützt und im Frequenzgang auf ca. 10 MHz begrenzt.
Nächste: Eingaenge (UDZ), Vorige: Aufgabe (UDZ), Nach oben: Up/Down-Zaehler [Inhalt]
Alle Eingangssignale werden vollständig auf verschiedene Phasen des internen 10 MHz-Taktes aufsynchronisiert, so dass der Karte die Eingangssignale völlig asynchron angeboten werden können, ohne Fehlfunktionen befürchten zu müssen. Aus diesem Aufsynchronisieren resultiert die Begrenzung der Zählfrequenz auf max. 5 MHz.
Mit dem Read-Signal wird der Inhalt des Zählregisters in ein Zwischenregister kopiert, wo er bis zur Übertragung zum Rechner gespeichert wird. Bis zum Abschluss der Übertragung befindet sich die Karte im Zustand Busy und weist weitere Read-Signale ab, d.h. der Inhalt des Zwischenregisters bleibt vom Zählvorgang unbeeinflusst. Das Zählen selber kann während des Übertragungsvorgangs völlig ungestört weitergeführt werden. Das aus dem Read-Vorgang resultierende Busy-Signal steht, bei entsprechender Verdrahtung (Siehe Interface-Steuerung (IFS).), auf der IFS-Karte an der Buchse Out zur Verfügung. Die Lifetime-Messung auf der IFS-Karte basiert ebenfalls auf dem durch den Read-Vorgang erzeugten Busy und zeigt nicht etwa die Zählverluste an. Die Totzeitverluste beim Zählen sind durch Vorschalten von Untersetzern leicht in vernachlässigbare Bereiche zu zwingen (Siehe »Totzeitbetrachtungen«.).
Vorige: Funktion (UDZ), Nach oben: Up/Down-Zaehler [Inhalt]
Count: Zähleingang
pos. flankengetriggert; ca. 5 MHz max.
Gate: Gate-Eingang für Count
High-Pegel: Gate offen
Read: Übertragen des Zählerinhaltes zum Rechner
pos. flankengetriggert;
gatebar über den GateQ-Eingang auf der IFS-Karte
Reset: Rücksetzen (auf 0) des Zählers
High-Pegel: Reset
(offener Eingang = High-Pegel!)
U/D\: Steuerung für Vorwärts/Rückwärts-Zählen
High-Pegel: Vorwärtszählen
Unbeschaltete Eingänge liegen auf High-Pegel!
Für alle Eingänge sind in Abhängigkeit von der Impulshöhe folgende minimalen Impulsbreiten erforderlich:
Pulshöhe min. Pulsbreite 5 V 25 ns 2.5 V 50 ns
Falls die Signale Read und Count bzw. Read und Reset gleichzeitig (Read bis ca. 50ns später) eintreffen, so wird zuerst die Read-Funktion ausgeführt. Soll Read nach der konkurrierenden Funktion ausgeführt werden, so muss es mindestens ca. 150ns nach dieser eintreffen. Liegt Read ca. 50 bis 150ns nach Count bzw. Reset, so ist die Reihenfolge unbestimmt.
Das Gate-Signal muss mindestens 20ns vor dem Count-Signal anstehen, damit das Zählen freigegeben wird.
Bei einer Änderung des U/D-Signals im Zeitraum von 0 bis 100ns nach dem Count-Signal ist die Zählrichtung unbestimmt.
Die angegebenen Zeitwerte sind gültig für eine Bestückung mit 74LS-Bausteinen. Sie stellen Richtwerte dar, die aufgrund von Exemplarstreuungen variieren können. In kritischen Fällen wird empfohlen, respektvollen Abstand (ca. 20ns) von den oben angegebenen Werten zu halten.
Nächste: Zaehlerbatterie, Vorige: Up/Down-Zaehler, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe | ||
| • Bedienungselemente |
Nächste: Bedienungselemente (AD574), Nach oben: 12-Bit ADC [Inhalt]
Diese Routing-Karte verwendet den AD583 Sample-and-Hold-Baustein und den AD574 12-Bit-ADC-Baustein von Analog Devices zur Digitalisierung von analogen Signalen. Der ADC arbeitet nach dem Verfahren der "Sukzessiven Approximation":
Konvertierungszeit : 15us - 35us max. Abtastrate : 26kHz max. Linear.-Fehler: 1/4 LSB Der Linearitätsfehler hat sich durch Alterung inzwischen deutlich verschlechtert!
Durch zwei Schalter auf der Frontplatte (Uni/Bi, 10V/20V) können folgende Messbereiche gewählt werden:
10V 20V Uni: 0V - +10V 0V - +20V Bi : -5V - +5V -10V - +10V
Vorige: Aufgabe (AD574), Nach oben: 12-Bit ADC [Inhalt]
P1: (Poti)
Offset-Abgleich für Bipolar-Modus des AD574 ADC-Bausteins
P2: (Poti)
Full-Scale-Abgleich für Bipolar-Modus des AD574 ADC-Bausteins
P3: (Poti)
Offset-Abgleich für Unipolar-Modus des AD574 ADC-Bausteins
P4: (Poti)
Offset-Abgleich des AD583 Sample-and-Hold-Bausteins
Uni/Bi: (Schalter)
Einstellung von uni- oder bipolarem Modus
10V/20V: (Schalter)
Messbereichseinstellung 10V oder 20V
Analog: (Analog-Eingang)
Eingang für das zu messende Analog-Signal
Gate: (TTL-Eingang)
Gate-Eingang für das Sample-Signal
High-Pegel: Gate offen
(offener Eingang = High-Pegel)
Sample: (TTL-Eingang)
Eingang für das Trigger-Signal.
Eine positive Flanke startet eine Konvertierung.
Nächste: Breiten- und Abstandsverteilung, Vorige: 12-Bit ADC, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe | ||
| • Funktion | ||
| • Zählerkarten |
Nächste: Funktion (ZLR), Nach oben: Zaehlerbatterie [Inhalt]
Die Zählerbatterie benötigt wie jede andere Datenquelle eine IFS-Karte (Siehe Interface-Steuerung (IFS).) direkt links neben der Zählersteuerung (ZLRS). Rechts anschließend sind die Zählerkarten (ZLRx) zu stecken bis zu einer maximalen Anzahl von 255 einzelnen Zählern. Jeder Zähler kann im allgemeinen nur ein Ereignis speichern und verwirft dann alle folgenden Ereignisse bis das gespeicherte Ereignis zum Rechner übertragen wurde. Die Zählersteuerung fragt reihum alle Zähler ab und sobald sie auf ein gespeichertes Ereignis stößt, überträgt sie die Nummer des Zählers zum Rechner und löscht den Speicher. Mit der Standard-Software zur Aufnahme von Spektren wird jedem Zähler ein Kanal im Spektrum zugeordnet. Die Nummerierung der Zähler beginnt bei der ersten Karte rechts von der Zählersteuerung und setzt sich auf den jeweils folgenden Zählerkarten fort. Im allgemeinen sind acht Zähler auf einer Karte untergebracht, wobei jedoch möglicherweise nicht alle von extern zugänglich sind (z.B. nur 4), weil die restlichen die Totzeitverluste ihrer Nachbarn registrieren.
Die Abfrage der Zähler erfolgt mit 5MHz. Ein voller Zyklus, in dem alle Zähler einmal abgefragt werden, dauert daher N * 200ns, falls keine Daten übertragen werden, wobei N die Anzahl der angeschlossenen Zähler ist. Werden Daten übertragen, so verlängert sich die Zeit. Die maximale Rate aller Zähler zusammen ist begrenzt durch die Übertragungskapazität der Verbindung zum Rechner.
Bei zu hohen Zählraten ist zur Vermeidung von Totzeitverlusten die Vorschaltung eines Untersetzers zu empfehlen (z.B. 1/10) (Siehe »Vorgeschaltete Untersetzer«.).
Nächste: Zaehlerkarten (ZLR), Vorige: Aufgabe (ZLR), Nach oben: Zaehlerbatterie [Inhalt]
Die Zählerbatterie besteht aus einer Zählersteuerung (ZLRS) und mehreren Zählerkarten (ZLRx) mit jeweils mehreren Zählern. Die Zählersteuerung fragt reihum alle Zähler mittels eines Abfrage-Bits (Select-Bit) ab (5MHz). Jede Zählerkarte enthält ein Schieberegister mit seriellem Eingang und parallelen Ausgängen, je einer für jeden Zähler, durch das dieses Abfrage-Bit geschoben wird. Ein Zähler ist selektiert, wenn das Bit auf dem ihm zugeordneten Ausgang erscheint. Falls er dann ein Ereignis gespeichert hat, meldet er über den PrivatBus ein ’Ready’ zur Zählersteuerung. Diese überträgt daraufhin (ReadyQ) die in einem 8-Bit-Register mitgezählte Nummer des selektierten Zählers an den Rechner. Mit der Quittung auf die Übertragung (AcceptedQ) wird der selektierte Zähler gelöscht und die Abfrage fortgesetzt.
Der Abfragezyklus passt sich der Anzahl der vorhandenen Zähler an. Zu diesem Zweck übergibt jede Zählerkarte eine Anfangs- (AM) und Endemeldung (EM) an die Zählersteuerung. Erscheint mit dem folgenden Takt nach einer EM keine AM, so bedeutet dies für die Zählersteuerung, dass die nächstfolgende Karte fehlt. Sie setzt daraufhin den Nummernzähler (8-Bit-Register) auf Null, löscht die Schieberegister aller Zählerkarten und generiert ein neues ’Select-Bit’.
Falls der Nummernzähler überläuft aufgrund eines Funktionsfehlers, oder weil mehr als 255 Zähler angeschlossen sind, so wird dies über eine LED auf der Frontplatte angezeigt. Ferner wird der Abfragezyklus abgebrochen und bei Zähler Null wieder begonnen. Die Fehleranzeige ist nur durch einen ’Stop’ zu löschen.
Die Zählersteuerung meldet Busy (BusyQ) solange das einsynchronisierte Ready eines Zählers oder die Quittung des Routing (AcceptedQ) ansteht. Solange BusyQ ansteht ist der Schiebetakt gesperrt.
Ein manueller oder Rechner-Stop (StopQ) erzeugt ein Reset-Signal (Reset), das die Synchronisier-FF’s für die Ready-Meldung und den gerade angewählten Zähler zurücksetzt. Da der Schiebetakt weiterläuft, werden bei anstehendem StopQ reihum alle Zähler immer wieder gelöscht, ohne dass dabei Daten übertragen werden.
Vorige: Funktion (ZLR), Nach oben: Zaehlerbatterie [Inhalt]
| • ZLR1 - Vierfachzähler mit Überlaufregistrierung (TTL-Eingänge) |
Nach oben: Zaehlerkarten (ZLR) [Inhalt]
Die Karte enthält 8 Zähler, wobei jedoch nur die Zähler 0,2,4,6 extern zugänglich sind. Die Zähler 1,3,5,7 dienen dazu, die Totzeitverluste jeweils ihrer Vorgänger zu registrieren. Auf diese Weise können Totzeitkorrekturen durchgeführt werden.
Über einen ’Gate’-Eingang können die Zähler an- und abgestellt werden. Das Gate-Signal beeinflusst nicht bereits gespeicherte Ereignisse. Der Gate-Eingang ist konjunktiv (UND) verknüpft mit dem Gate-Signal von der IFS-Karte, d.h. beide Signale müssen auf High-Potential liegen, wenn die Zähler arbeiten sollen. Offene Anschlüsse liegen auf high.
Über eine LED wird angezeigt, wenn einer der Zähler ein Ereignis an das Routing überträgt.
Bedienungselemente, Anzeigen
0, 2, 4, 6: (BNC-Buchsen, TTL-Eingänge)
Eingänge für die vier Zähler 0,2,4,6. Gezählt werden die
Low-High-Übergänge. Falls der geradzahlige Zähler bereits ein
Ereignis speichert, wird der nächstfolgende ungeradzahlige
Zähler gesetzt. Ist auch dieser belegt, so geht das Ereignis
verloren.
Anzeige: (LED)
Die LED leuchtet immer, wenn einer der 8 Zähler ein Ereignis
an den Rechner überträgt.
Nächste: Abstandsverteilung, Vorige: Zaehlerbatterie, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe, Funktion | ||
| • Bedienungselemente |
Nächste: Bedienungselemente (BAV), Nach oben: Breiten- und Abstandsverteilung [Inhalt]
Die BAV-Karte misst mit Hilfe der Uhr-/Zähler-Karte (s.h 4.2) die Breite eines TTL-Signals oder den Abstand von zwei aufeinander folgenden TTL-Signalen. Die zeitliche Auflösung der Messung ist die der Uhr-Karte, bei internem Takt also 100ns. Die maximal messbaren Breiten bzw. Abstände sind durch ein Poti auf der Frontplatte im Bereich von ca. 50us bis 2ms einstellbar. Nach Ablauf des Zeitlimits wird die Karte zurückgesetzt und kann nach ca. 100ns das nächste Signal verarbeiten, um eine neue Messung zu beginnen. Werden die von der Uhr-Karte übertragenen Messdaten mit einem Vielkanal-Programm (z.B. MCA) erfasst, so erhält man als ’Spektrum’ die zeitliche Verteilung von Breite oder Abstand.
Die BAV-Karte muss direkt rechts neben der Uhr-Karte stecken und erhält von dieser über die P-Bus-Leitung 28a das BusyQ-Signal. Solange die Uhr-Karte busy meldet, werden von der BAV-Karte keine Eingangssignale verarbeitet.
Breitenverteilung
Es wird der zeitliche Abstand zwischen ansteigender und
abfallender Flanke des Eingangssignals gemessen. Bei nicht zu
hoher Signalrate kann jedes Signal gemessen werden.
Abstandsverteilung
Es wird der zeitliche Abstand zwischen den ansteigenden
Flanken zweier aufeinander folgender Eingangssignale gemessen.
Daher kann bestenfalls nur jeder zweite Abstand gemessen
werden.
Vorige: Aufgabe (BAV), Nach oben: Breiten- und Abstandsverteilung [Inhalt]
Breite/Abstand: (Schalter)
Umschaltung von Breite- auf Abstands-Messung
Limit: (10-Gang-Poti)
Einstellung des Zeitlimits (50us - 2ms) für die einzelne
Messung
Reset: (BNC-Ausgang)
Ansteuerung des Reset-Eingangs der Uhr-Karte
Uhr: (BNC-Ausgang)
Ansteuerung des Uhr-Eingangs der Uhr-Karte
Puls: (BNC-Eingang)
Eingang für das zu messende TTL-Signal
Vorige: Breiten- und Abstandsverteilung, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe | ||
| • Funktion | ||
| • Bedienungselemente | ||
| • Beispiele für Abstandsverteilungen | ||
| • Tabellen |
Nächste: Funktion (SAV), Nach oben: Abstandsverteilung [Inhalt]
Bei vielen Experimenten (z.B. Wirkungsquerschnittsmessungen) ist es wichtig zu wissen in wie weit die erwartete Poisson-Verteilung der Ereignisse gestört ist z.B. durch Totzeit, Nachimpulse des Detektors, periodische Störungen usw.. Als eine geeignete Diagnosemöglichkeit bietet sich das Messen der Abstandsverteilung der Ereignisse an. Für Poisson-verteilte Ereignisse sind die Abstände exponentiell abfallend verteilt, in logarithmischer Darstellung erhält man also eine Gerade. Damit können Abweichungen von der Poisson-Verteilung rasch erkannt werden. Selbst mit dem Auge nicht mehr sichtbare Abweichungen können leicht durch einen Fit mit statistischer Wichtung aufgespürt werden, wenn das reduzierte Chi-Quadrat nicht in der Nähe von 1 liegt (Chi-Quadrat-Test, sh. Tab.).
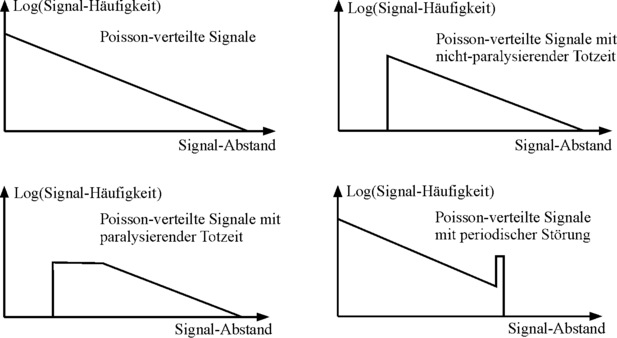
Die Abstände zeitlich statistischer Signale (Poisson-Verteilung) sind exponentiell abfallend verteilt, d.h. in Log-Darstellung als abfallende Gerade.
Durchlaufen solche Signale eine nicht-paralysierende Totzeit, d.h. Signale, die in eine Totzeit fallen verlängern diese nicht, so erhält man wiederum die gleiche exponentielle Verteilung, aber um die Totzeit verschoben und um die Totzeitverluste vermindert.
Für eine paralysierende Totzeit, bei der jedes Signal, das in die Totzeit seines Vorgängers fällt, nur die Totzeit verlängert aber selbst nicht durchkommt, ist das der Totzeit nachfolgende mehr oder weniger ebene Dach charakteristisch. Mit zunehmender Zählrate wird der Abfall zunächst steiler und dann wieder flacher bis schließlich kein Ereignis mehr passieren kann.
Bei einer periodischen Störung in Poisson-verteilten Signalen können nur maximale Abstände in der Länge der Periode der Störung auftreten.
Mehr zu Totzeitverlusten und Abstandsverteilungen finden Sie unter Zählratenstatistik.
Nächste: Bedienungselemente (SAV), Vorige: Aufgabe (SAV), Nach oben: Abstandsverteilung [Inhalt]
Es wird der zeitliche Abstand zwischen den ansteigenden Flanken zweier aufeinander folgender Eingangssignale gemessen. Für zufällige Ereignisse könnte man die Messung zu irgendeinem beliebigen Zeitpunkt starten und würde immer die richtige Abstandsverteilung erhalten, da die Vorgeschichte nicht in die Messung eingeht. Da jedoch auch nicht zufällige Signale wie Nachimpulse von Detektoren, periodische Störungen usw. richtig vermessen werden sollen, wird der exakte Abstand zwischen zwei aufeinanderfolgenden Signalen gemessen, was einen deutlich höheren Hardware-Aufwand bedeutet, da jedes Signal gleichzeitig Stop und Start einer Messung ist.
Die Zeitmessung erfolgt mit einer 20Mhz Quarzuhr, d.h. mit einer Auflösung von 50ns. Niedrigere Zeittakte sind durch Austausch des Quarzoszillators möglich. Für höhere Frequenzen muss jedoch ein schnellerer ispLSI-Baustein (1032E-100MHz) eingesetzt werden.
Die Zeitmessung erfolgt mit 16 Bits, bei einer Taktfrequenz von 20MHz können also Pulsabstände bis 3.27675ms gemessen werden. Darüber hinaus gehende Abstände werden im letzten Kanal (65535) gesammelt. Der Kanal 0 entspricht dem Abstand 0, der aus verständlichen Gründen nicht gemessen werden kann. Der Übergang von einem Kanal zum nächsten erfolgt linear gleitend, d.h. Abstände der Länge n+p (n ganz, p<1) tragen 1-p Anteile zum Kanal n und p Anteile zum Kanal n+1 bei.
!!! Bei Verwendung des Messprogrammes MCA mit dem Display-Programm Peak ist zu beachten, dass die Kanäle von 1 ab gezählt werden!!!
Totzeitverluste
Damit nach einer erfolgten Abstandsmessung nicht erst auf die Übertragung
der Daten gewartet werden muss und dadurch das nächste Intervall
verloren geht, ist dem Uhrregister ein 2-stufiger Fifo-Speicher
nachgeschaltet. Gemäß der Poisson-Verteilung der eintreffenden
Signale können jedoch zufälligerweise mehrere kurze Intervalle
hintereinander eintreffen, so dass die Kanalkapazität des Übertragungsweges
überschritten wird und Daten verloren gehen. Bei statistischen Pulsen
verzerren diese Verluste nicht die Abstandsverteilung bei periodischen
Pulsen können allerdings Interferenzen auftreten (s.u.)
Da der Fifo-Speicher die statistischen Schwankungen ausgleicht, minimiert er deutlich die Totzeitverluste (sh. Tab.)
Interferenzen bei periodischer Pulsfolge
Bei gewissen periodischen Mustern von kurzen und langen Abständen
können Interferenzen mit der internen Ablaufsteuerung auftreten,
die die gemessene Abstandsverteilung verzerren. Bei einer Fifo-Tiefe
von 2 würde z.B. eine periodische kurz-kurz-lang Abstandsfolge
dazu führen, dass jeder zweite lange Abstand durch Totzeit
verloren geht. Kurz bedeutet kürzer als die halbe
Datenübertragungszeit und lang bedeutet länger als die
dreifache Datenübertragungszeit. Eine kurz-lang Abstandsfolge
würde hingegen richtig wiedergegeben.
Nächste: Beispiele (SAV), Vorige: Funktion (SAV), Nach oben: Abstandsverteilung [Inhalt]
Puls: (BNC-Eingang)
Eingang für das zu messende TTL-Signal > 20ns
Nächste: Tabellen (SAV), Vorige: Bedienungselemente (SAV), Nach oben: Abstandsverteilung [Inhalt]
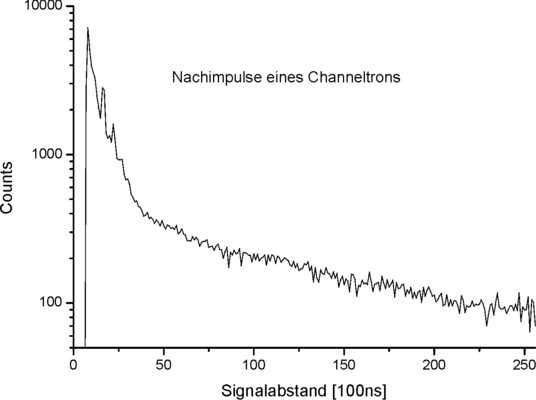
Totzeit (500ns) und Nachimpulse (bis ca. 4 us) eines Channeltrons.
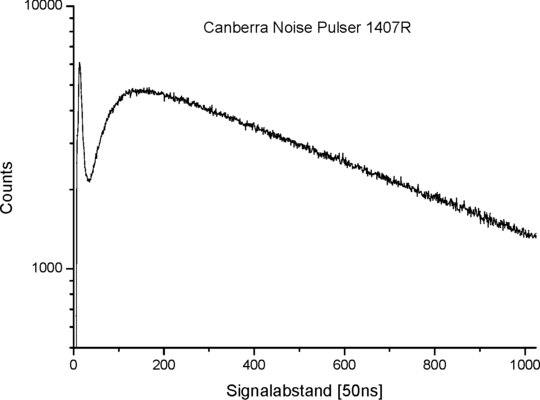
Der "Noise Pulsers" 1407R von Canberra zeigt eine markante Abweichung von der Poisson-Statistik unterhalb von 10 us.
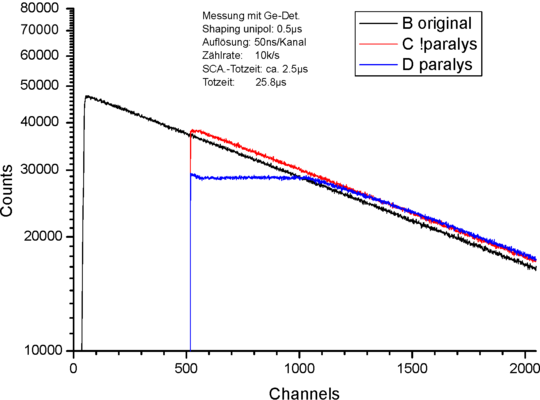
Ge-Detektorsignale bei Verwendung eines Hauptverstärkers (, 500ns Shaping, unipolar) mit "Pole-Zero-Cancellation".
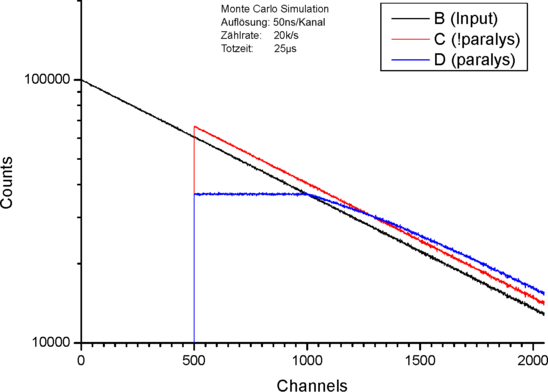
Monte-Carlo-Simulation der Abstandsverteilung nach einer Totzeit bei Poisson-verteilter Eingangsrate.
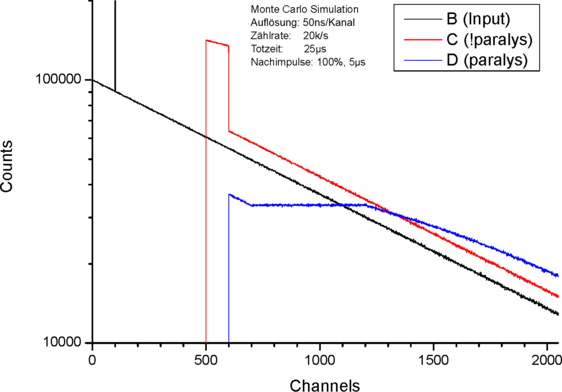
Monte-Carlo-Simulation der Abstandsverteilung nach einer Totzeit bei Poisson-verteilter Eingangsrate mit 100% Nachimpulsen.
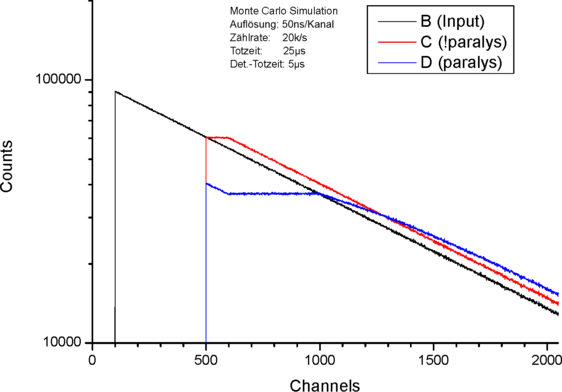
Monte-Carlo-Simulation der Abstandsverteilung nach einer Totzeit bei Poisson-verteilter Eingangsrate, die bereits eine vorausgegangene nicht paralysierende Totzeit durchlaufen hat.
Vorige: Beispiele (SAV), Nach oben: Abstandsverteilung [Inhalt]
Chi-Quadrat Test (1-P)
(1-P): Wahrscheinlihkeit, dass redChi^2 kleiner ist
Freiheitsgrade
redChi^2 200 400 600 800 1000 1200
0.900 0.1582 0.0749 0.0380 0.0200 0.0107 0.0058
0.920 0.2151 0.1273 0.0800 0.0518 0.0341 0.0227
0.940 0.2813 0.1998 0.1488 0.1135 0.0878 0.0686
0.960 0.3549 0.2912 0.2473 0.2135 0.1863 0.1637
0.980 0.4333 0.3970 0.3709 0.3497 0.3317 0.3158
1.000 0.5133 0.5094 0.5077 0.5066 0.5059 0.5054
1.020 0.5917 0.6196 0.6418 0.6606 0.6769 0.6916
1.040 0.6657 0.7197 0.7590 0.7899 0.8153 0.8366
1.060 0.7329 0.8039 0.8504 0.8836 0.9083 0.9271
1.080 0.7918 0.8699 0.9146 0.9425 0.9606 0.9728
1.100 0.8417 0.9182 0.9551 0.9746 0.9854 0.9915
Totzeitverluste bei statistischen Pulsen Verluste: 1 - exp(-RT) * (1 + RT + RT**2/2 +..+ RT**n/n!) R: Datenrate T: Totzeit = 3000ns mittel, 5200ns max, nicht paralysierend n+1: Fifo-Tiefe Bei RT > 1 wird die Kanalkapazitaet ueberschritten und es kommt zum Datenstau. RT \ 1 2 3 4 Fifo-Tiefe 0.00 0.0000 0.0000 0.0000 0.0000 0.02 0.0198 0.0002 0.0000 0.0000 0.04 0.0392 0.0008 0.0000 0.0000 0.06 0.0582 0.0017 0.0000 0.0000 0.08 0.0769 0.0030 0.0001 0.0000 0.10 0.0952 0.0047 0.0002 0.0000 0.15 0.1393 0.0102 0.0005 0.0000 0.20 0.1813 0.0175 0.0011 0.0001 0.25 0.2212 0.0265 0.0022 0.0001 0.30 0.2592 0.0369 0.0036 0.0003 0.35 0.2953 0.0487 0.0055 0.0005 0.40 0.3297 0.0616 0.0079 0.0008 0.45 0.3624 0.0754 0.0109 0.0012 0.50 0.3935 0.0902 0.0144 0.0018 0.60 0.4512 0.1219 0.0231 0.0034 0.70 0.5034 0.1558 0.0341 0.0058 0.80 0.5507 0.1912 0.0474 0.0091 0.90 0.5934 0.2275 0.0629 0.0135 1.00 0.6321 0.2642 0.0803 0.0190
Nächste: Zaehlratenstatistik, Vorige: Standard-Interface-Karten, Nach oben: Top [Inhalt]
Diese Interface-Entwicklungen werden hier nur aufgelistet und sind in den Unterlagen für die einzelnen Experimente im Detail beschrieben. Diese Aufstellung enthält auch Oldies, in der Hoffnung, sie eines Tages wieder recyclen zu können.
| • Elektron-Positron-Spaltfragment-Winkelverteilungs-Experiment (K5) | ||
| • Ion-Ion-Stoß-Experiment (Labor 016) | ||
| • Elektron-Ion-Stoß-Experiment (Labors 017, SI) |
Nächste: Ion-Ion-Stoss, Nach oben: Spezielle Interface-Karten [Inhalt]
EPOS-Steuerung
EPOS-Messprogramm
Eingabe des LB-Triggers und Generierung von Gate- und
Delay-Signalen für die "in beam" und "out of beam" Messphasen.
Nächste: Elektron-Ion-Stoss, Vorige: EPOS-Steuerung, Nach oben: Spezielle Interface-Karten [Inhalt]
LIC-Interface
IIM-, IIC-, LIC-Messprogramme
Umschalter IIM-, IIC-, LIC-Messungen; Kontrolle der
LIC-Positions-Laufzeit-Messung
TAKT-Karte
IIC-, IIF-, IIP-, LIC-, LIP-Messprogramme
Takte zum Auslesen der Zählerkarten; Totzeitmessung
IIM-Interface
IIM-, LIC-Messprogramme
Interface zum SSL-2401 Position-Computer
LII-Interface
LII-, LIP-Messprogramme
FIFO-gepufferte Dateneingabe für
Pulsed-Beam-Koinzidenz-Experimente; Interface zum SSL-2401
Position-Computer
Vorige: Ion-Ion-Stoss, Nach oben: Spezielle Interface-Karten [Inhalt]
ESS-Kontrolle
ESS-Messprogramm
Totzeit-Überwachung.
ESS-Kanalnummer-Eingabe
ESS-Messprogramm
Interface für parallele Eingabe der aktuellen Kanalnummer.
DRM-Interface
DRM-Messprogramm
Interface zum SSL-2401 Position-Computer
Nächste: Technische Details, Vorige: Spezielle Interface-Karten, Nach oben: Top [Inhalt]
Die Zählratenstatistik ist inzwischen zu einem eigenen Paper geworden.
HTML-Version:
http://www.strz.uni-giessen.de/ExpHelp/statistik/statistik.html
PDF-Version:
http://www.strz.uni-giessen.de/ExpHelp/statistik/statistik.pdf
Nächste: Oldies, Vorige: Zaehlratenstatistik, Nach oben: Top [Inhalt]
| • Routing-Bus | ||
| • Komponenten und Schnittstellen | ||
| • Schaltungsunterlagen |
Nächste: Komponenten und Schnittstellen, Nach oben: Technische Details [Inhalt]
| • Routing-Bus Signale | ||
| • Routing-Bus Abschluss |
Nächste: Routing-Bus Abschluss, Nach oben: Routing-Bus [Inhalt]
Der Routing-Bus (Tab. 7.1.1.1) besteht aus zwei Teilen, dem ’Allgemeinen Bus’, der über die ganze Breite des Überrahmens geht und dem ’Privat-Bus’, der erst durch das Stecken benachbarter Karten entsteht und auf diese begrenzt ist.
Allgemeiner Bus (A-Bus)
Der allgemeine Bus belegt die Anschlüsse 1a, 1c usw. bis 21c.
Die Anschlüsse mit dem Suffix a und c führen
im Gegensatz zum Privat-Bus zu verschiedenen Bus-Leitungen und
dürfen nicht gebrückt werden.
+ 5V / 10A +15V / 1A -15V / 1A
TN: Normal-Scanner TV: Vorrang-Scanner
Privat-Bus (P-Bus)
Der Privat-Bus baut sich erst durch Stecken der Karten auf.
Eine fehlende Karte oder das Fehlen entsprechender Brücken auf
den Karten unterbrechen den Privat-Bus. Er reicht von den
Leitungen 22 bis 32 einschließlich. Die Leitungen mit dem
Suffix a führen zur linken Nachbarkarte und die mit c zur
rechten. Soll ein Bus aufgebaut werden, so sind die Anschlüsse
a und c einer Leitung zu brücken. Die individuelle Nutzung des
Privat-Busses ist den einzelnen Kartenbeschreibungen zu
entnehmen (z.B. RST-, IFS-, KPL- Karten).
Tab. 7.1.1.1 Data-Routing-Bus
a Pin c
----------------------------------------------------------
Spannungs- (digital) +5V 1 +5V (digital) Spannungs-
Versorgung (digital) 0V 2 0V (digital) Versorgung
----------------------------------------------------------
D0\ 3 D1\
D2\ 4 D3\
D4\ 5 D5\
D6\ 6 D7\
D8\ 7 D9\
D10\ 8 D11\
D12\ 9 D13\
D14\ 10 D15\
A-Bus Kopp-Bit\ 11 LFT-Bit\ A-Bus
SAddr0\ 12 1MHz-Clock
SAddr1\ 13 PAddr1\
SAddr2\ 14 PAddr2\
SAddr3\ 15 PAddr3\
RequestB 16 ReadyB\
StopB\ 17 AcceptedB
10MHz-Clock\ 18 10MHz-Clock
TV 19 TN
(analog) 0V 20 PrioReqB\
(analog) +15V 21 -15V (analog)
----------------------------------------------------------
22
23
24
25
P-Bus 26 P-Bus
27
28
29
30
31
32
----------------------------------------------------------
(Signalnamen mit '\': aktiv low)
Vorige: Routing-Bus Signale, Nach oben: Routing-Bus [Inhalt]
Der Bus-Abschluss ist normalerweise ganz links auf der
Rückseite der ersten VG-Steckerleiste installiert. Es bestehen
jedoch auch Sonderlösungen durch von vorne gesteckte Karten,
insbesondere wenn der Überrahmen in einen Data-Routing-Bus und
einen Control-Routing-Bus aufgeteilt ist.
Der Bus-Abschluss ist je nach Aufgabe der Bus-Leitungen als
aktiver Abschluss (ca. 3V) oder durch Pulldown-Widerstände
realisiert (Abb. 7.1.2.1). Der 27 Ohm Widerstand, mit denen
die Pulldowns zusammengefasst sind, ist experimentell ermittelt
und verbessert die Signale ganz erheblich. Insbesondere
vermindert er ein Übersprechen, das im Data-Routing zum
Ausfall einzelner 10MHz-Takte beim Schalten der
SADR(0:3)-Leitungen geführt hatte. Warum das Ganze gerade in
dieser Beschaltung ordentlich läuft, weiß keiner so recht. Die
von den Interface-Karten erzeugten Signale können mittels
Treiber-Bausteinen mit mindestens 15mA (besser 24mA)
Low-Signalstrom (z.B. ’LS245, ’LS373, ’LS374) auf den Bus
gegeben werden.
Bei der Entwicklung von Interface-Karten bitte stets darauf
achten, dass sowohl Sender- als auch Empfänger-Bausteine
möglichst nahe am Bus platziert werden! Denn ein solcher Bus
ist eine sehr heikle Hf-Übertragungsstrecke (ca. 20MHz), die
man durch falsch aufgebaute Steckkarten empfindlich stören
kann.
Abb. 7.1.2.1 Routing-Bus-Abschluss
D00\ 3a <--220Ohm--|
D01\ 3c <--220Ohm--|
D02\ 4a <--220Ohm--|
D03\ 4c <--220Ohm--|
D04\ 5a <--220Ohm--|
D05\ 5c <--220Ohm--|
D06\ 6a <--220Ohm--|
D07\ 6c <--220Ohm--| +---------+
D08\ 7a <--220Ohm--| | aktiver |
D09\ 7c <--220Ohm--+---------|Abschluss|
D10\ 8a <--220Ohm--| | 3 Volt |
D11\ 8c <--220Ohm--| +----+----+
D12\ 9a <--220Ohm--| |
D13\ 9c <--220Ohm--| ===
D14\ 10a <--220Ohm--|
D15\ 10c <--220Ohm--|
Kopp-Bit\ 11a <--220Ohm--|
LFT-Bit\ 11c <--220Ohm--|
1MHz-Clock 12c <--220Ohm--|
ReadyB\ 16c <--220Ohm--|
PrioReqB\ 20c <--220Ohm--|
PADR1\ 13c )
PADR2\ 14c ) Steckplatzkodierung 0V/5V
PADR3\ 15c )
SADR0\ 12a <--220Ohm--|
SADR1\ 13a <--220Ohm--| +---------+
SADR2\ 14a <--220Ohm--| |passiver |
SADR3\ 15a <--220Ohm--+---------|Abschluss|
RequestB\ 16a <--220Ohm--| | 27 Ohm |
StopB\ 17a <--220Ohm--| +----+----+
AcceptedB 17c <--220Ohm--| |
10MHz-Clock\ 18a <--220Ohm--| ===
10MHz-Clock 18c <--220Ohm--|
TV 19a <--220Ohm--|
TN 19c <--220Ohm--|
(analog) 0V 20a <--220Ohm--|
Nächste: Schaltungsunterlagen, Vorige: Routing-Bus, Nach oben: Technische Details [Inhalt]
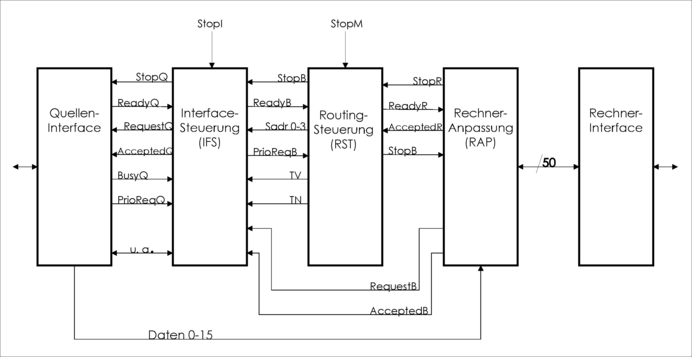
Abb. 7.2.0.1 Komponenten und Schnittstellen des Routing
Nächste: Quellen-Interface <-> Interface-Steuerung, Nach oben: Komponenten und Schnittstellen [Inhalt]
Eine solche Schnittstelle existiert immer dann, wenn ein bereits vorhandenes Gerät angeschlossen werden soll (z.B. ein Silena ADC wird mittels Silena-ADC-Interface an das Routing angepasst) und ist i.a. ausschließlich für diesen Zweck ausgelegt.
Nächste: Interface-Steuerung, Vorige: Datenquellen <-> Quellen-Interfaces, Nach oben: Komponenten und Schnittstellen [Inhalt]
Die IFS-Karte baut nach rechts einen Privat-Bus den IFS-Bus zum Quellen-Interface hin auf. Er endet normalerweise beim Quellen-Interface, wobei dieses jedoch aus mehreren Karten bestehen darf. Alle Signalnamen auf dem IFS-Bus enden mit Q. Die Signalbezeichnungen sind in positiver Logik angegeben, d.h. wenn an einer Leitung ’high’ anliegt, so ist das zugehörige Signal wahr. Ein Backslash "\" bedeutet die Negierung eines Signals: BUSY\ = NOT (BUSY). Wenn also eine Datenquelle Busy meldet, dann liegt ’low’ auf der Leitung BUSY\. Mit ’^’ gekennzeichnete Signale werden auf der IFS-Karte erzeugt.
^LFTQ\: (Lifetime Quelle)
Dieses Signal wird auf der IFS-Karte erzeugt und stellt
die Lifetime (=NOT(Totzeit)) zur Verfügung. LFTQ setzt
sich konjunktiv (UND) zusammen aus der negierten
Busy-Meldung der Datenquelle (BusyQ\), dem Eingang GateQ
der IFS-Karte (Option), und im Kopplungsmodus K2 der
Lifetime-Meldung LFTK der Kopplung.
LFTQ= BusyQ\ * GateQ(Option) * (K2 * LFTK\)\
PrioReqQ\: (Vorrang Quelle)
Dieses Signal zeigt der IFS-Karte an, dass die Quelle mit
Vorrang bedient zu werden wünscht. Es kann statisch
anstehen, mit ReadyQ wird es wirksam. PrioReqQ schaltet die
IFS-Karte in den Kopplungsmodus Frei. Eine Datenquelle,
die mit Vorrang läuft, kann deshalb nicht an einer
Datenkopplung teilnehmen.
^GateSQ: (Gate Quelle)
Mit diesem Signal gatet die IFS-Karte die angeschlossene
Datenquelle auf- und zu.
BusyQ: (Busy Quelle)
Mit diesem Signal meldet die Datenquelle ihr Busy an die
IFS-Karte.
^StopQ: (Stop Quelle)
Dieses Signal teilt der Datenquelle mit, dass ihr keine
Daten vom Routing abgenommen werden. Als Ursachen hierfür
kommen in Frage:
Normalerweise cleart dieses Signal die Datenquelle.
ReadyQ\: (Data Ready Quelle)
^RequestQ: (Data Request Quelle)
^AcceptedQ: (Data Accepted Quelle)
Diese drei Signale bilden zusammen einen Hand-Shake-Dialog
(Abb. 7.2.2.2) zur Übernahme der Daten von der Quelle.
Mit ReadyQ teilt die Datenquelle der IFS-Karte mit, dass
sie ein Datenwort übertragen möchte. Dieses Signal muss
zumindest bis zum Beginn von RequestQ anstehen.
Mit RequestQ fordert die IFS-Karte die Datenquelle auf,
für die Dauer des Signals ihre Daten auf den Bus zu geben.
Mit AcceptedQ wird der Datenquelle mitgeteilt, dass die
Daten übernommen wurden.
Daten(0-15): (Datenleitungen)
Die Daten laufen nicht über die IFS-Karte sondern werden
direkt auf den Routing-Bus gegeben. Sie
sind über Treiber-Bausteine mit mindestens 24mA
Low-Signalstrom (z.B. ’LS245, ’LS373, ’LS374) auf die
Leitungen zu geben.
KoppK: (Kopplungssignal)
BusyK: (Busy Kopplung)
LFTK: (Lifetime Kopplung)
Diese Signale gehören dem Kopplungs-Bus an und werden
zusammen mit der Kopplungskarte beschrieben (Siehe Kopplungskarte <-> Interface-Steuerungen.).
Tab. 7.2.2.1 Schnittstelle zur Datenquelle (IFS-Bus) Signal Funktion Leitung IFS Quelle KPL LFTQ Lifetime 25 c a PrioReqQ\ Vorrang 26 c a GateSQ Gate 27 c a BusyQ\ Busy 28 c a StopQ Stop 29 c a AcceptedQ Data 30 c a RequestQ\ Data Request 31 c a ReadyQ\ Date Ready 32 c a KoppK\ Kopplungssignal 23 a,c a,c a BusyK\ Kopplung 24 a,c a,c a LFTK Lifetime 22 a,c a,c a
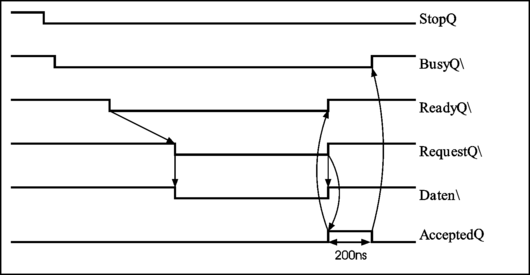
Abb. 7.2.2.2 Timing zwischen IFS-Karte und Datenquelle
Nächste: Interface-Steuerung <-> Routing-Steuerung, Vorige: Quellen-Interface <-> Interface-Steuerung, Nach oben: Komponenten und Schnittstellen [Inhalt]
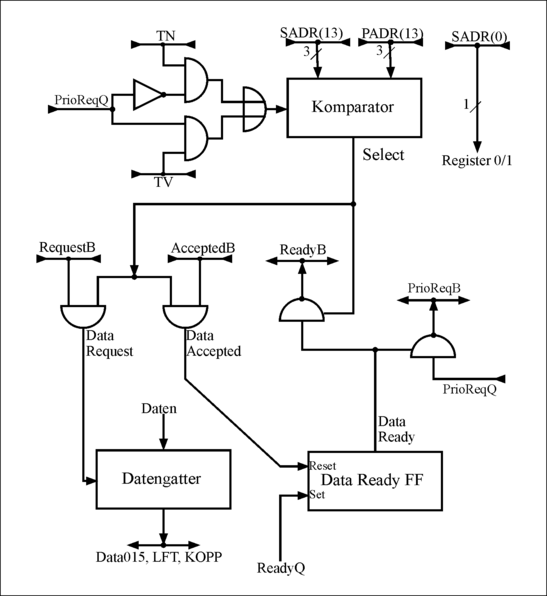
Abb. 7.2.3.1 Interface-Steuerung
Nächste: Routing-Steuerung, Vorige: Interface-Steuerung, Nach oben: Komponenten und Schnittstellen [Inhalt]
Die Routing-Steuerung verständigt sich mit der Interface-Steuerung durch einen Hand-Shake-Dialog über Signalleitungen des Routing-Busses:
Signalnamen ohne Backslash ’\’: aktiv high
Signalnamen mit Backslash ’\’: aktiv low
Ein ’^’ vor dem Signalnamen: die Routing-Steuerung ist die
Quelle des Signals
^10 MHz-Clock,-Clock\
Quarzstabilisierter 10MHz Mastertakt der Routing-Steuerung.
Tastverhältnis: 1:2
Stabilität: 10ppm
^1 MHz-Clock
vom Mastertakt abgeleiteter 1MHz-Takt.
Tastverhältnis: 1:2
^SAddr0..3\ (Scanner-Adresse)
Scanner-Adresse (4 Bits) zur Abfrage der Interface-Steuerungen.
ReadyB\
Die abgefragte Interface-Steuerung meldet sich bei der
Routing-Steuerung mit ReadyB, falls sie ein Datenwort
übertragen will.
^StopB\
Dieses Signal teilt allen Interface-Steuerungen mit, dass die
Routing-Steuerung gestoppt wurde (manuell oder durch Rechner).
^TN, ^TV
Freigabetakte für den Adressvergleich auf den
Interface-Steuerungen für Normal- (TN) bzw.
Vorrangmodus (TV).
PrioReqB\
Anmeldung eines vorrangigen Bearbeitungswunsches bei der
Routing-Steuerung durch die Interface-Steuerungen.
Dieses Signal muss mit ’Open-Collector-Technik’ (wired OR)
beschaltet werden.
Nächste: Routing-Steuerung <-> Rechneranpassung, Vorige: Interface-Steuerung <-> Routing-Steuerung, Nach oben: Komponenten und Schnittstellen [Inhalt]
Im Mai 2000 wurde eine Neuentwicklung der Routing-Steuerung fertiggestellt und nach und nach zum Einsatz gebracht. Sie verwendet die alten Frontplatten. Die Schaltung ist im wesentlichen auf einem hochintegrierten, programmierbaren Baustein untergebracht. Ihre Funktionalität und Betriebssicherheit wurden verbessert.
Die Routing-Steuerung ist mit zwei alternativ laufenden Scannern unterschiedlicher Priorität ausgestattet, mit denen die Eingabekanäle abgefragt werden. Sie schickt zu diesem Zweck über vier Bus-Leitungen (SAddr0..3) nacheinander die Scanner-Adressen 0-15 an alle Interface-Steuerungen. Diese vergleichen die drei höchstwertigen Bits der Scanner-Adressen mit ihrer Steckplatzadresse (PAddr1..3), die für jeden Steckplatz fest verdrahtet ist. Bei Gleichheit gilt der Eingabekanal als angewählt und kann bei Bedarf mit der Routing-Steuerung kommunizieren.
Es besteht die Möglichkeit, einen oder mehrere Eingabekanäle mit Vorrang vor den anderen abfragen zu lassen. Dazu müssen diese Eingabekanäle einen Vorrangwunsch (PrioReqB) bei der Routing-Steuerung anmelden, sobald sie bereit sind ein Datenwort zu übertragen. Diese Anmeldung kann zu jeder Zeit asynchron erfolgen. Nach jedem Scanner-Schritt prüft die Routing-Steuerung die PrioReqB-Leitung ab und setzt den Betrieb mit dem gewünschten Scanner (Vorrang- bzw. Normal-Scanner) fort. Der jeweils ruhende Scanner behält seine Position bei, so dass er an der unterbrochenen Stelle weiterlaufen kann. Der im Vorrangmodus arbeitende Eingabekanal muss sich des Freigabetaktes TV bedienen im Gegensatz zu TN für den Normalmodus.
Ein Stop der Routing-Steuerung kann vom Rechner her erfolgen (StopR) oder über einen Schalter auf der Frontplatte (StopM). Beide bewirken ein Anhalten der Daten-Scanner. Ferner wird der Stop den Eingabekanälen mitgeteilt (StopB) und über die Interface-Steuerung den Datenquellen (StopQ).
Da das gleichzeitige Schalten aller Scanner-Adress-Bits zu massiven Störungen auf dem Routing-Bus geführt hat (einzelne 10MHz Takte wurden verstümmelt), ist die Folge der Scanner-Adressen so gewählt, dass sich stets nur möglichst wenig Bits gleichzeitig ändern. Da die IFS1-Karte das niederwertigste Bit als Clock-Signal verwendet, muss dieses eine 0-1-0 Folge haben. Unter dieser Voraussetzung und der Forderung nach der Möglichkeit für einen verkürzten Scanner-Umlauf, war eine Beschränkung auf 2-Bit-Wechsel möglich.
Die Scanner-Adressen sind in vier Gruppen zusammengefasst, die sich am Anfang und Ende auch gegenüber einigen anderen Gruppen nur um maximal zwei Bits unterscheiden. Sie können deshalb in Einer-, Zweier- und Vierer-Kombinationen verknüpft werden.
Gruppe 0, Adressen 0 - 3
0 0 0 0
0 0 0 1
0 0 1 0
0 0 1 1
Gruppe 1, Adressen 4 - 7
0 1 1 0
0 1 1 1
0 1 0 0
0 1 0 1
Gruppe 3, Adressen 12 - 15
1 1 0 0
1 1 0 1
1 1 1 0
1 1 1 1
Gruppe 2, Adressen 8 - 11
1 0 1 0
1 0 1 1
1 0 0 0
1 0 0 1
Erlaubte Kombinationen von Gruppen mit maximal 2-Bit-Wechsel sind:
0, 1, 2, 3, 0-1, 0-2, 1-3, 2-3, 0-1-3-2
Bei unzulässigen Kombinationen, und falls kein Jumper gesetzt ist, wird 0-1-3-2 ausgeführt.
Es ist zu beachten, dass die verschiedenen Eingabekanäle von der Routing-Steuerung nicht nach einem ’first in - first out’ Verfahren bearbeitet werden, sondern durch einen Scanner reihum abgefragt werden. Dies kann zur Folge haben, dass die einzelnen Eingabekanäle nicht in der Reihenfolge zum Rechner übertragen werden, in der sie zur Übertragung bereit waren. Die damit zusammenhängenden Probleme der Verkoppelung von Datenquellen z.B. bei Koinzidenzexperimenten sind jedoch berücksichtigt (Siehe Kopplungskarte <-> Interface-Steuerungen.).
Da den 4 Bits der Scanner-Adresse nur 3 Bits der Steckplatzadresse gegenüberstehen, kann das niederwertigste Bit der Scanner-Adresse zur Adressierung zweier Register verwendet werden. Die Standard-Interface-Steuerung (IFS-Karte) macht bei der Lifetime-Messung von dieser Möglichkeit Gebrauch.
Die von der Interface-Steuerung zugeführten Signale ReadyB und PrioReqB werden sorgfältig einsynchronisiert , so dass sie asynchron zu den internen Vorgängen auftreten dürfen.
Das Protokoll mit den Eingabekanälen und der Rechneranpassung ist auf der Routing-Steuerung als Zustandsautomat realisiert (Abb. 7.2.5.1, 7.2.5.2):
Bei der Rückkehr nach Z0 wird die nächste Scanner-Adresse geschaltet und das Vorrangsignal (PrioReqB) einsynchronisiert (A4).
Ferner wird ReadyR an die Rechneranpassung weitergegeben zur Anmeldung einer Datenübertragung. Sobald die Rechneranpassung bereit ist, ein Datenwort aufzunehmen, meldet sie sich mit einem Data-Request-Signal (RequestB) und veranlasst damit ein Öffnen der Datengatter des angewählten Eingabekanals (Quellen-Interface). Aus den 16 Daten-Bits, dem LFT- und Kopp-Bit und den 4 Bits der Scanner-Adresse setzt die Rechneranpassung ein Datenwort zusammen (Siehe »Rechneranpassung«.) und überträgt es zum Rechner. Der Empfang der Daten wird von der Rechneranpassung mit den Data-Accepted-Signalen AcceptedB und AcceptedR quittiert. Auf der Routing-Steuerung bewirkt die Rückflanke von AcceptedR ein Weiterstarten des Daten-Scanners unabhängig davon ob ReadyB noch ansteht oder nicht. Die Datenquelle wird durch AcceptedB im allgemeinen zu einer Normierung veranlasst, zur Vorbereitung auf das nächste Datenwort.
In Z21 wird auf das Data Accepted (AcceptedR) der Rechneranpassung gewartet und in Z22 auf dessen Ende.
Bei der Rückkehr nach Z0 wird die nächste Scanner-Adresse geschaltet und das Vorrangsignal (PrioReqB) einsynchronisiert (A4).
Timing:
Der Zustandsautomat wird mit 10MHz getaktet. Daraus ergibt sich folgendes Timing
(zum Vergleich die Werte für die ausgemusterte Routingsteuerung).
| neu | alt | ||
| Adressfortschaltung im Leerlauf | A = | 300ns | 400ns |
| Datenübertragung | D = | 400ns | 500ns |
| Scanner-Prioritätswechsel | P = | 400ns | 0ns |
| 4 Gruppen, 1 Sanner-Umlauf: | |||
| Leerlauf | (16A) | 4800ns | 6400ns |
| 1 Prio 0 Datenübertragung | (16A + D) | 5200ns (192kHz) | 7100ns (141kHz) |
| 1 Prio 1 Datenübertragung | (16A + 2P + D) | 6000ns (167kHz) | 7100ns (141kHz) |
| 2 Gruppen, 1 Sanner-Umlauf: | |||
| Leerlauf | (8A) | 2400ns | |
| 1 Prio 0 Datenübertragung | (8A + D) | 2800ns (357kHz) | |
| 1 Prio 1 Datenübertragung | (8A + 2P + D) | 3600ns (278kHz) | |
| 1 Gruppe, 1 Sanner-Umlauf: | |||
| Leerlauf | (4A) | 1200ns | |
| 1 Prio 0 Datenübertragung | (4A + D) | 1600ns (625kHz) | |
| 1 Prio 1 Datenübertragung | (4A + 2P + D) | 2400ns (417kHz) |
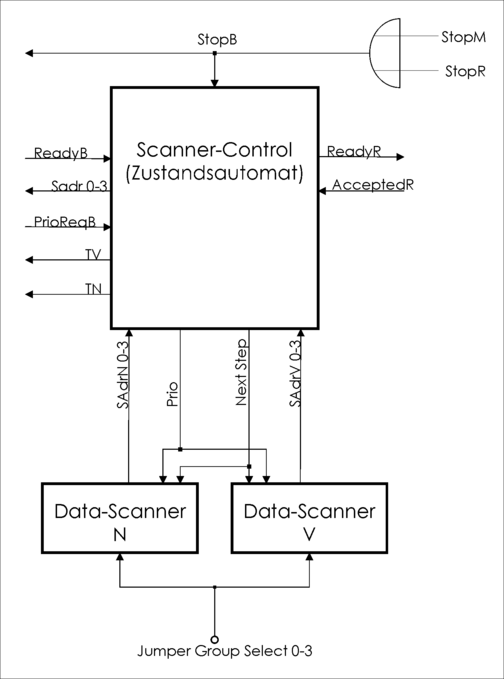
Abb. 7.2.5.1 Routingsteuerung
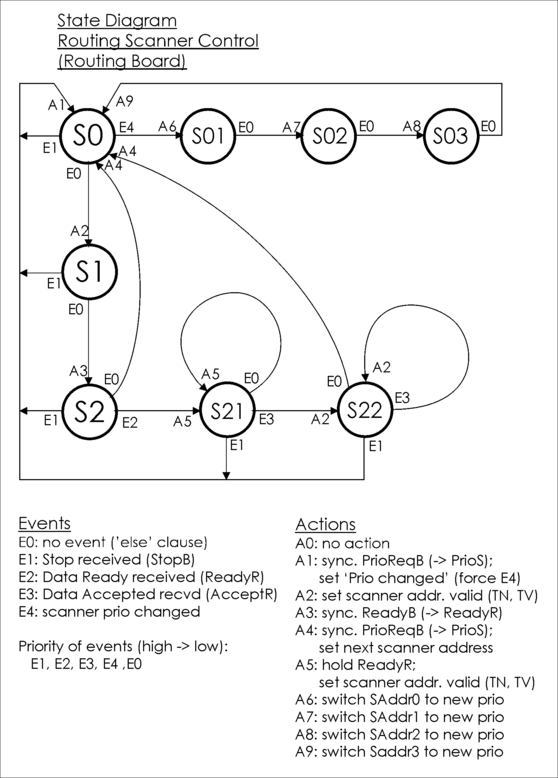
Abb. 7.2.5.2 Zustandsdiagramm Scanner Control
Abb. 7.2.5.3a Data Transfer Timing IFS1 Board / Control Board / Routing Board Prio 0: (RtBoard Firmware 1.2, Hardware-Aenderung 1.2a) ns 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 25ns ..|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|... Clock \_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_ PrioReqB __________________________________________________________________________ TN ______/^^^\___/^^^^^^^^^^^^^^^\___/^^^\_______/^^^\_______/^^^\___________ TV __________________________________________________________________________ ReadyB _______/^^^\___/^^^^^^^^^^^^^^^\__________________________________________ ReadyR __________/^^^^^^^^^^^\___________________________________________________ RequestB ______________/^^^^^^^\___________________________________________________ AcceptR __________________/^^^^^^^\_______________________________________________ AcceptB ______________________/^^^^^^^\___________________________________________ 25ns ..|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|... ns 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 States S 0 1 2 21 21 22 22 0 1 2 0 1 2 0 1 2 0 States R 0 0 0 1 2 2 0 0 0 0 0 0 0 0 0 0 0
Abb. 7.2.5.3b Data Transfer Timing IFS1 Board / Control Board / Routing Board Prio 0: (RtBoard Firmware 1.2, ohne Hardware-Aenderung 1.2a) ns 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 25ns ..|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|... Clock \_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_ PrioReqB __________________________________________________________________________ TN ______/^^^\___/^^^^^^^^^^^^^^^^^^^^^^^\___/^^^\_______/^^^\_______/^^^\___ TV __________________________________________________________________________ ReadyB _______/^^^\___/^^^^^^^^^^^^^^^^^^^^^^^\__________________________________ ReadyR __________/^^^^^^^^^^^^^^^\_______________________________________________ RequestB ______________/^^^^^^^\___________________________________________________ AcceptR ______________________/^^^^^^^^^^^\_______________________________________ AcceptB ______________________/^^^^^^^^^^^\_______________________________________ 25ns ..|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|... ns 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 States S 0 1 2 21 21 21 22 22 22 0 1 2 0 1 2 0 1 2 States R 0 0 0 1 2 2 2 0 0 0 0 0 0 0 0 0 0 0
Abb. 7.2.5.3c Data Transfer Timing IFS1 Board / Control Board / Routing Board Prio 1: (RtBoard Firmware 1.2, Hardware-Aenderung 1.2a) ns 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 800 25ns ..|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...| Clock \_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/^\_/ PrioReqB ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^\_______________________________ TN __/^^^\___________________________________________________________________/^^^\ TV ______________________________/^^^\___/^^^^^^^^^^^^^^^\________________________ ReadyB _______________________________/^^^\___/^^^^^^^^^^^^^^^\_______________________ ReadyR __________________________________/^^^^^^^^^^^\________________________________ RequestB ______________________________________/^^^^^^^\________________________________ AcceptR __________________________________________/^^^^^^^\____________________________ AcceptB ______________________________________________/^^^^^^^\________________________ 25ns ..|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...|...| ns 0 100 200 300 400 500 600 700 800 900 0 100 200 300 400 500 600 700 800 States S 1 2 0 01 02 03 0 1 2 21 21 22 22 0 01 02 03 0 1 States R 0 0 0 0 0 0 0 0 0 1 2 2 0 0 0 0 0 0 0
Nächste: USB Anpassung, Vorige: Routing-Steuerung, Nach oben: Komponenten und Schnittstellen [Inhalt]
Die Routing-Steuerung verständigt sich mit der Rechneranpassung durch einen Hand-Shake-Dialog, zum Teil über Leitungen des Privat-Busses nach rechts. Die Routing-Steuerung muss deshalb stets direkt links von der Rechneranpassung stecken. Beide Karten sollten vorzugsweise ganz rechts im Überrahmen untergebracht werden. (Siehe »Überrahmen«.).
Signalnamen ohne Backslash ’\’: aktiv high
Signalnamen mit Backslash ’\’: aktiv low
Ein ’^’ vor dem Signalnamen: die Routing-Steuerung ist die
Quelle des Signals
^ReadyR\ (Data Ready)
Mit diesem Signal wird die Rechneranpassung von der
Routing-Steuerung aufgefordert, ein Datenwort zu übernehmen.
Es steht solange an bis die Rechneranpassung AcceptedR sendet.
RequestB (Data Request)
Mit diesem Signal zeigt die Rechneranpassung dem angewählten
Eingabekanal an, dass das Datenwort auf den Bus zu schalten
ist.
AcceptedB (Data Accepted)
Mit diesem Signal an den Eingabekanal quittiert die Rechneranpassung
den Empfang des Datenwortes.
AcceptedR (Data Accepted)
Mit diesem Signal von der Rechneranpassung wird der
Routing-Steuerung mitgeteilt, dass die Übertragung beendet ist.
Diese nimmt ReadyR zurück und startet den aktuellen Scanner
nach dem Ende von AcceptedR.
StopR\
Stop der Routing-Steuerung durch den Rechner.
^SAddr0..3\ (Scanner-Adresse)
Die Scanner-Adresse wird von der Rechneranpassung dem
Datenwort als Quellenkennung beigefügt (Siehe »Rechneranpassung«.).
Tab. 7.2.6.1 Privat-Bus-Belegung (RST-Bus) Signal Leitung RST RAP AcceptedR 24 c a StopR 25 c a ReadyR 27 c a
Nächste: VME Anpassung, Vorige: Routing-Steuerung <-> Rechneranpassung, Nach oben: Komponenten und Schnittstellen [Inhalt]
Mit dem UpGrade auf VxWorks 7 werden die MVME-Rechner nicht mehr unterstützt, es besteht jedoch die Möglichkeit für eine Rechneranpassung über USB, so dass PCs als Laborrechner zum Einsatz kommen können.
Die USB-Anbindung wurde mit einem FTDI FT2232H MINI MODULE realisiert. Aus der Auswahl von Industriestandards, die der FT2232H IC bietet, ist insbesondere der folgende wegen der großen FIFOs für die Rechneranpassung geeignet:
Asynchronous FIFO Interface Mode Dual Port FIFO TX Buffer (4 Kbytes per interface) Dual Port FIFO RX Buffer (4 Kbytes per interface)
| • FT2232H Mini Modul (USB) | ||
| • Rechneranpassung (USB) |
Nächste: Rechneranpassung (USB), Nach oben: USB Anpassung [Inhalt]
Der FT2232H Baustein des Mini Moduls muss mit Hilfe des
FTDI-FT_PROG Windows-Programmes über USB konfiguriert werden.
Mit ’DEVICES -> Scan and Parce’ wird der Ist-Zustand des
EEPROM ausgelesen und kann editiert werden.
Und mit ’DEVICES -> Program’ wird der EEPROM programmiert.
Mit ’File -> Save As Template’ kann die Konfiguration eines
bereits programmierten FT2232H auf einen neuen übertragen werden.
Die Data-Routing Konfiguration unterscheidet sich vom Control-Routing nur in der Serial Number:
USB Device Descriptor Custom VID/PID: FTDI Default Vendor ID: 0403 Product ID: 6010 USB Version: USB 2.0 USB Config Descriptor -> bmAttributes Bus Powered: yes Self Powered: no Max Bus Power: 150 mA USB Remote Wakeup: no Pull Down IO...: no USB String Descriptors Manufacturer: FTDI Product Descr.: FT2232H Mini Modul Ser. Num. Enabled: yes Auto Gen. Ser. No: no Serial Number: IAMP-DataRout Ser. Num. Prefix: Hardware Spezific DPRDRV : 0 Suspend on DBus7 Low: no Port A/B -> Hardware: 245 FIFO Port A/B -> Driver: Virtual COM Port I/O Pins -> Group.. -> Slow Slew: no I/O Pins -> Group.. -> Drive: 8mA I/O Pins -> Group.. -> Schmitt..: no
Durch eine Fehlbedienung kann der EEPROM unbrauchbar werden. Dann hilft nur ein ’Disaster Recovery’. Von FTDI gibt es eine Anleitung dazu. Benötigt wird ein intaktes Mini Modul und das defekte muss vermutlich aus der Schaltung raus...
Vorige: FT2232H Mini Modul (USB), Nach oben: USB Anpassung [Inhalt]
Das Mini Modul bietet zwei Ports. Über Port-1 erfolgt die Kontrolle des Datentransfers und die Statusabfrage. Port-0 dient dem Datentransfer.
Die Rechneranpassung verfügt über eine StandAlone-Funktion um das Data-Routing für Tests ohne USB-Anschluss betreiben zu können. Dabei werden alle Datenquellen permanent abgefragt wenn der USB-Anschluss fehlt.
" ******** Data Routing Control Port Programmierung ******** " Ein Kommando an den Control Port besteht aus einem Byte, in dem nur die " drei hoechstwertigen und die zwei niederwertigsten Bits ausgewertet werden: " "***** Control commands" " [x,x,x,x,x,x,0,0] "Send status" " [x,x,x,x,x,x,1,1] "Send status" " Es werden zwei Bytes zurueck gesendet: " 1. Header Byte: [0,1,0,0,0,0,1,0] " 2. Status Byte: [r,s,f,m,x,x,x,x] " r = 1: 'Reset Routing' ist gesetzt " s = 1: 'Stop Data Transfer' ist gesetzt " f = 1: 'FPGA Testdaten' ist gesetzt " m = 1: manueller Stop Datentransfer " " [r,s,f,x,x,x,0,1] "Clear control bits" " r = 1: 'Reset Routing' wird geloescht " s = 1: 'Stop Data Transfer' wird geloescht " f = 1: 'FPGA Testdaten' wird geloescht " " [r,s,f,x,x,x,1,0]; "Set control bits" " r = 1: 'Reset Routing' wird gesetzt " s = 1: 'Stop Data Transfer' wird gesetzt " f = 1: 'FPGA Testdaten' wird gesetzt " ********
" ******** Data Routing Data Port Programmierung ******** " * Das einzige Kommando an den Data Port besteht nur aus einem Byte " um eine Pause fuer den Datentransfer ein und aus zu schalten um " Buffer-Ueberlaeufe zu verhindern. " [x,x,x,x,x,x,x,1] Transferpause einschalten " [x,x,x,x,x,x,x,0] Transferpause ausschalten " " " * Der Datentransfer des Data Ports besteht aus vier Bytes: " 1. Header Byte: [0,1,1,0,0,0,1,0] " " 2. Status Byte: [F,0,I,I,I,I,I,I] " F == 1: USB Fifo overflow ??? " [I,I,I,I,I,I]: Data ID des uebertragenen Datenwortes " " 3. Data High Byte: " 4. Data Low Byte: " Als Datenwort wird das Routing Datenregister uebertragen. " ********
Vorige: USB Anpassung, Nach oben: Komponenten und Schnittstellen [Inhalt]
| • Rechneranpassung (VME) | ||
| • Rechneranpassung <-> Rechner-Interface (VME) | ||
| • Rechner-Interface (VME) |
Nächste: Rechneranpassung <-> Rechner-Interface (VME), Nach oben: VME Anpassung [Inhalt]
Die VME Rechneranpassung ist mit einem 2048 Wort tiefen und 3 Byte breiten Fifo ausgerüstet, um vorrübergehende Unterbrechungen der Datenübertragung (z.B. durch Störungen) überbrücken zu können. Der Zustand des Fifo (halbvoll, voll), nach dem ein Datenwort gespeichert wurde, wird jedem Datenwort als Status-Bits mitgegeben. Ferner steht der aktuelle Zustand des Fifo (leer, halbvoll, voll, Fehler) stets dem Rechner zur Abfrage zur Verfügung.
Mittels der Zustandssignale (leer, halbvoll, voll) der drei Fifo-Bausteine wird überwacht, ob die drei Bausteine noch synchron sind. Im Fehlerfall wird ein Status-Bit gesetzt, das von der Software nur durch ein ’Stop Datenübertragung’ gelöscht werden kann. Diese Überwachung erkennt einen Fifo-Fehler u. U. nicht sofort, sondern erst, wenn die Zustands-Flags der drei Bausteine nicht mehr gleich sind.
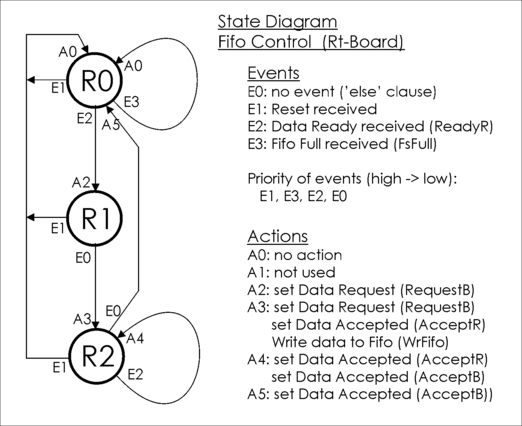
Abb. 7.2.7.1 Zustandsdiagramm Fifo Control
Nächste: Rechner-Interface (VME), Vorige: Rechneranpassung (VME), Nach oben: VME Anpassung [Inhalt]
Hardware-Verbindung Rechneranpassung –> Rechner-Interface
Die Datenübertragung von der Rechneranpassung zum Rechner-Interface
geschieht über ein 50-poliges Flachbandkabel. Tests mit einem 40m langen
Kabel haben gezeigt, dass bis zu dieser Länge noch eine gesicherte Übertragung
möglich ist. Möglichst kurze Kabellängen sind jedoch zu empfehlen,
da die Kabellänge in die Übertragungsgeschwindigkeit eingeht (s.u.)
und wegen höherer Störungssicherheit.
Tab. 7.2.8.1 Steckerbelegung 50 pol. Verbindungskabel
| Pin | Signal | Pin | Signal | |
| 1,2,..,50 | Ground Ground Ground | |||
| 3 | Fifo full | 27 | Routing online P | |
| 5 | Fifo failure | 29 | Routing stopped | |
| 7 | Fifo half full | 31 | Data Available bit 1 | |
| 9 | Routing online N | 33 | Data Available bit 0 | |
| 11 | not used | 35 | Data 7 | |
| 13 | not used | 37 | Data 6 | |
| 15 | Data Request bit 0 | 39 | Data 5 | |
| 17 | Stop Routing | 41 | Data 4 | |
| 19 | Data Request bit 1 | 43 | Data 3 | |
| 21 | IP-Board ID bit 2 | 45 | Data 2 | |
| 23 | IP-Board ID bit 1 | 47 | Data 1 | |
| 25 | IP-Board ID bit 0 | 49 | Data 0 |
Verbindungs-Check Rechneranpassung –> Rechner-Interface
Um Verwechslungen der IP-Boards (Rechner-Interfaces)
für Data-Routing und Control-Routing zu erkennen
(sie unterscheiden sich nur in unterschiedlicher Firmware),
bieten die IP-Boards der Rechneranpassung eine 3 Bit Board-ID an,
die mit der Board-ID der Rechneranpassung verglichen wird. Die
Rechneranpassung schaltet nur auf Online wenn beide IDs gleich
sind. Das Ergebnis des Vergleichs wird dem Rechner-Interface
über die komplementären Leitungen ’Routing online P/N’
mitgeteilt und kann vom Rechner als Status-Bit abgefragt
werden. Ein negatives Ergebnis (Routing offline) entsteht ebenfalls,
wenn das Routing abgeschaltet ist oder das Verbindungskabel fehlt.
Data Transfer Protokoll Rechneranpassung –> Rechner-Interface
Rechneranpassung: Rechner-Interface:
Sender Empfänger
Data Transfer Slave Data Transfer Master
10 Mhz Clock 8 Mhz Clock
Ein vollständiger Übertragungszyklus (Abb. 7.2.8.2, 7.2.8.3) überträgt nacheinander drei Bytes (16 Bits Daten, 8 Bits Status). Der Empfänger (Rechner-Interface) zeigt mit ’DataRequestN’ (N = 1,3,2) an, dass er zur Aufnahme von Daten-Byte N bereit ist. Der Sender (Rechneranpassung) antwortet mit ’DataAvailableN’ und der Übertragung von Daten-Byte N. Mit ’DataRequest0’ und ’DataAvailable0’ wird die Übertragung beendet. Erst wenn ’DataRequest0’ UND ’DataAvailable0’ anstehen kann eine neue Übertragung starten. ’DataRequest1’ wird vom Sender ignoriert, solange keine Daten vorhanden sind.
N ist mit jeweils zwei Leitungen binaer kodiert. Die Reihenfolge von N ist so gewählt (N = 1,3,2), dass sich immer nur ein Bit ändert, um bei Flankenüberschneidungen falsche N zu vermeiden.
Das Eintreffen eines unerwarteten ’DataRequestN’ bzw. ’DataAvailableN’ bei Sender oder Empfänger führt zu einem Abbruch der Datenübertragung durch ’DataRequest0’ bzw. ’DataAvailable0’. Noch nicht gesendete Bytes eines Datenwortes gehen dabei verloren.
Die Übertragung wird überwacht und im Falle von Störungen wiederholt. Zur Erkennung von Störungen auf dem Verbindungskabel werden 3 (Sender) bzw. 2 (Empfänger) Leitungen mit konstanten und komplementären Signalpegeln auf Signaleinbrüche sowohl nach High als auch nach Low überwacht. Störungen werden dadurch erkannt und registriert, dass zwischen zwei !Clock-Signalen eine überwachte Leitung sowohl High als auch Low war. Das Ergebnis wird mit einem nachfolgenden Clock überprüft und gibt Auskunft ob die mit dem vorhergehenden Clock (zwischen den beiden !Clock) übernommenen Signale gestört waren. Im Störungsfall werden ’DataRequestN’ bzw. ’DataAvailableN’ solange aufs Neue übernommen, bis dies fehlerfrei geklappt hat.
Anfangs wurde ein deutlich schnelleres, jedoch nicht ausreichend
fehlersicheres Übertragungsprotokoll verwendet:
Die Übertragung eines Datenwortes (3 * 1Byte) startet mit dem Senden
vom ’DataRequest’. Die Übertragung der Bytes erfolgt mit 3 Strobe-Signalen
’DataAvailable’ (200ns, Pause 200ns).
Um mögliche Störungen der Handshake-Signale durch den Datentransfer zu
vermeiden, wird ’DataAvailable’ sowohl mit Clock als auch mit !Clock
übernommen und nur weiter verarbeitet, wenn beide Ergebnisse gleich sind.
Bei länger andauernden Störungen kann dabei jedoch ein ’DataAvailable’
völlig verloren gehen, was mit einem Timer überwacht werden muss
und zu einem Datenverlust führt.
Die neue, fehlersichere Übertragung mit Handshake-Protokoll benötigt mehr Zeit als die alte mit Strobe-Signalen und darüberhinaus geht die Kabellänge in die Übertragungszeit ein. Folgende Zeiten werden für den Transfer von der Rechneranpassung zum Rechner-Interface (Anfang erstes bis Ende letztes Data-Byte) benötigt. Durch das Einsynchronisieren auf die unterschiedlichen Clock-Signale von Rechneranpassung und Rechner-Interface entstehen min/häufigste/max Zeiten:
altes Protokoll: 1200ns Handshake-Laufzeiten neues Protokoll 1m Kabel: 1600/1700/(1800)ns 6 *1m *5ns/m = 30ns neues Protokoll 5m Kabel: 1700/1800/1900ns 6 *5m *5ns/m = 150ns neues Protokoll 40m Kabel: 2900ns 6 *40m *5ns/m = 1200ns
EMV-Tests:
Durch periodisches Ein- und Ausschalten einer Weller 21021 Lötstation
wurden in einem halb drumherum gelegten 50-pol., ca. 5m Verbindungskabel
EM-Störungen erzeugt und deren Auswirkungen mit VMETST, Test Data-Routing,
10^7 Transfers, incrementierend, beobachtet.
Fehlertyp 1: Wortfehler in der Form:
n: expected: ABCD read: ABCD+1
Fehlertyp 2: Bitfehler in der Form:
n: expected: ABCD read: XYCD
n+1: expected: XYCD+1 read: ABCD+1
Fehlertyp 3: Data Errors:
beim Transfer gingen Bytes verloren
Fehlertyp 4: Data Errors Falschmeldung:
da als Status 0xffff gelesen wird, wird fälschlicherweise
ein Data Error gemeldet
Ergebnisse für altes (schneller) und neues (verbesserte Fehlersicherung)
Transfer-Protokoll und die verschiedenen IP-Carrier (10^7 Transfers):
IP-Carrier Protokoll Typ1 Typ2 Typ3+4
VIPC616 alt 10 2 0
VIPC616 neu 1,4 1,4 0
IPC01 neu 2 5 1
Weitere Tests haben gezeigt, dass das IPC01 deutlich empfindlicher ist
und insbesondere den Typ 4 auch ohne laufenden Daten-Transfer immer
wieder bringt. Dabei ist sehr häufig das Auslesen des Status durch
den Computer gestört (Status = 0xffff), was dann fälschlicherweise
als Data-Error interpretiert wird (nur IPC01)! Passiert auch ohne
Datentransfer und mit offenem Kabel!
Einige Windungen des Kabels um einen Ferrit-Ring bringen möglicherweise
eine Verbesserung.
Das Verbinden der Abschirmflächen unter den IP-Boards mit Masse
(Lötpunkte für Brücken waren vorgesehen, aber nicht gebrückt)
bringt möglicherweise eine Verbesserung.
Das Einlöten des zweiten Steckers zur IPC01 Seite hin (mit geerdeten
Abschirmflächen) beseitigt schließlich diesen Fehlertyp 4 weitgehend,
mit Ferrit-Ring (3 Windungen) auf der IPC01-Seite sogar vollständig!
Danach taucht aber der Typ 2 offensichtlich verstärkt auf, und ebenso
immer wieder FIFO Errors! Der geänderte VMETST liest jetzt die Daten
zweimal aus und vergleicht. Dies hat gezeigt, dass beim Auslesen keine
Fehler auftreten, sondern die Daten schon falsch übertragen werden.
Das Problem hat sich jetzt möglicherweise auf die Routing Seite verlagert?!
Ein Ferrit-Ring (3 Windungen) auf der Routingseite vermindert die Fehler
deutlich (10**8 Transfers, neues Protokoll, 5m Kabel):
(Wk = kleiner Ferrit, Wg = großer Ferrit) Carrier Ferrit Typ1 Typ2 Typ3 Typ4 FIFO-Errors IPC01 kein 2*10 14*10 1*10 0 ja IPC01 3Wg IPC01 45 51 0 0 ? IPC01 3Wg Routing 1 0 0 2 nein IPC01 1Wk IPC01+ 3Wg Routing 4 1 0 0 nein IPC01 3Wg IPC01+ 3Wg Routing 1 6 0 1 ja IPC01 1Wg IPC01+ 3Wg Routing 1 5 0 3 nein IPC01 1Wg IPC01+ 1Wg Routing viele viele 0 0 mehrere
Der Erfolg hängt offensichtlich auch von der Anordnung der Ferrits und dem Typ ab.
Großer, grüner Ferrit: IPC01 4Wg Routing 2 6 0 6 nein Großer, schwarzer, zerbrochener Ferrit: IPC01 4Wg Routing ja ja ja ja ja
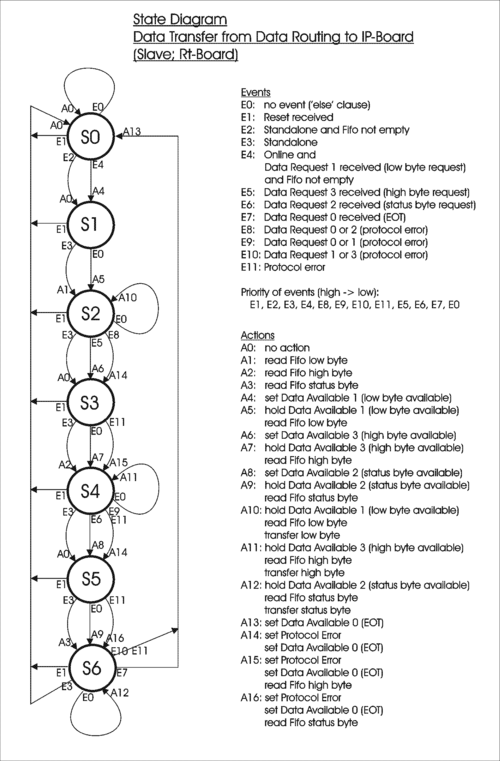
Abb. 7.2.8.2 Data Transfer Zustandsautomat Rechneranpassung
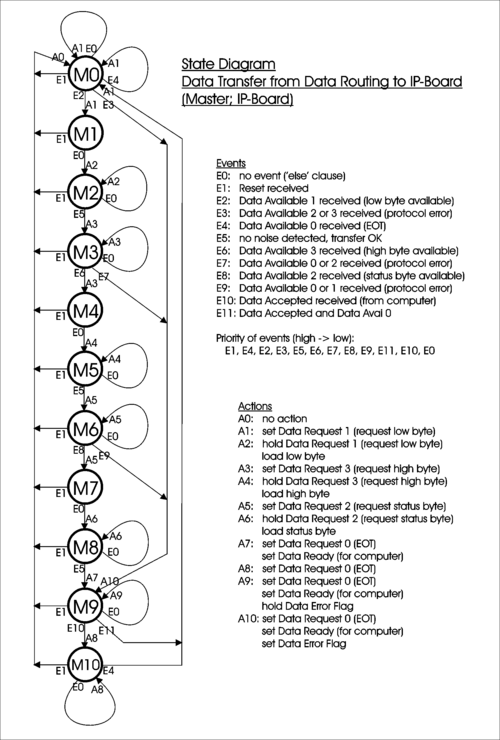
Abb. 7.2.8.3 Data Transfer Zustandsautomat Rechner-Interface
Vorige: Rechneranpassung <-> Rechner-Interface (VME), Nach oben: VME Anpassung [Inhalt]
Das rechnerseitige Interface ist auf einem doppelten IP-Board (Industrie Pack) untergebracht. Es wird das gleiche IP Board Layout verwendet wie für das Control-Routing Interface, und unterscheidet sich lediglich in der Programmierung des ispLSI-Bausteins. Industrie Pack Carrier gibt es für eine ganze Reihe verschiedener Plattformen (z.B. VME, PC). Zur Zeit sind VME-Boards als Carrier im Einsatz (GreenSpring VIPC616, MicroSys IPC01, Motorola CPU-Boards MVME162, MVME172, MVME172P).
Das Rechner-Interface empfängt von der Routing-Seite 2 Daten-Bytes (Data00-15) und ein Status-Byte (Data16-23), das den Status zur Zeit der Entstehung des Datenwortes enthält (Status00-07). Bei der Übertragung zum Rechner wird ein weiteres Status-Byte hinzugefügt, das den gerade aktuellen Status enthält (Status08-15).
Das IP-Board besitzt je ein 16Bit-Register für Status und Daten, die mit und ohne Löschen vom Rechner gelesen werden können. Solange sie nicht gelöscht sind, werden keine neuen Daten vom Routing übertragen.
Die Ein- und Ausgabe zu dem IP-Board erfolgt in 16 Bit Worten. Ein gültiges Datenwort und Routing-seitiges Status-Byte kann nur gelesen werden, wenn im Statuswort folgende Bedingungen erfüllt sind:
Tab. 7.2.9.1 Programmierung des Rechner-Interfaces
*** Address decoding:
A2 A1 A0 (Read)
0 0 0 Read Status only
0 1 0 Read Status and clear Data
1 0 0 Read Data only
1 1 0 Read and clear Data
A2 A1 A0 (Write)
0 0 0 Write Control
*** Bit Control word
15 Stop data transfer
14-00 not used
*** Bit Data word Status word
15 Data15 Data transfer error
- die Daten sind bei der Übertragung verloren
gegangen
14 Data14 Routing online
- das Routing ist angeschlossen und angeschaltet
13 Data13 Data transfer stopped
- die Übertragung ist durch Rechner oder manuell
gestoppt
12 Data12 Data ready
- es steht ein Datenwort zum Lesen bereit
11 Data11 Fifo full (at Status read time)
- das Fifo auf der Rechneranpassung meldet aktuell
'voll'
10 Data10 Fifo half full (at Status read time)
- das Fifo auf der Rechneranpassung meldet aktuell
'halb voll'
09 Data09 Data transfer busy
- es wird gerade ein Datentransfer von der
Rechneranpassung zum IP-Board durchgeführt
08 Data08 Fifo failure
- Funktionsstörung des Fifo auf der
Rechneranpassung
07 Data07 Fifo full (at Data time) (Data23)
- nach Ablage der Daten im Fifo war dieses voll
06 Data06 Fifo half full (at Data time) (Data22)
- nach Ablage der Daten im Fifo war dieses mehr
als halb voll
05 Data05 LFT-Bit (Data21)
- Lifetime Kennungs-Bit
04 Data04 K-Bit (Data20)
- Kopplungs Kennungs-Bit
03 Data03 Scanner addr. bit 3 (Data19)
- Routing-Steckplatz-Kennungs-Bit 3
02 Data02 Scanner addr. bit 2 (Data18)
- Routing-Steckplatz-Kennungs-Bit 2
01 Data01 Scanner addr. bit 1 (Data17)
- Routing-Steckplatz-Kennungs-Bit 1
00 Data00 Scanner addr. bit 0 (Data16)
- Routing-Steckplatz-Kennungs-Bit 0
[Inhalt]
subsection Kopplungskarte <-> Interface-Steuerungen
Der Kopplungs-Bus baut sich von der Kopplungskarte ausgehend nach links als Privat-Bus auf. Alle Karten sollten möglichst die Pins a und c der Leitungen 22, 23, 24 gebrückt haben, um den Kpl-Bus nicht zu unterbrechen.
LFTK: (Lifetime Kopplung, Leitung 22)
Über diese Leitung meldet die Kopplung ihre Totzeit. Es
wird dazu das Lifetime-Signal LFTQ der zur Kopplungskarte
gehörigen IFS-Karte verwendet, die im Modus Frei läuft
(K2=0). Statt BusyQ übergibt die Kopplung jedoch BusyK an
die IFS-Karte.
high: Kopplung ist frei
LFTK = BusyK\ * GateQ (falls verdrahtet)
KoppK\: (Kopplungssignal, Leitung 23)
Über diese Leitung bietet die Kopplung den angeschlossenen
IFS-Karten nach dem Start das Kopplungssignal an.
Low: Kopplung aktiv
BusyK\: (Busy Kopplung, Leitung 24)
Auf diese Leitung geben die IFS-Karten der gekoppelten
Quellen und die Kopplungskarte selber in
’wired-or’-Schaltung ihr Busy.
Vorige: Komponenten und Schnittstellen, Nach oben: Technische Details [Inhalt]
| • Board Interface-Steuerung | ||
| • Board Routing-Steuerung | ||
| • Board Rechneranpassung | ||
| • Board Rechner-Interface |
Nächste: Board Routing-Steuerung, Nach oben: Schaltungsunterlagen [Inhalt]
Nächste: Board Rechneranpassung, Vorige: Board Interface-Steuerung, Nach oben: Schaltungsunterlagen [Inhalt]
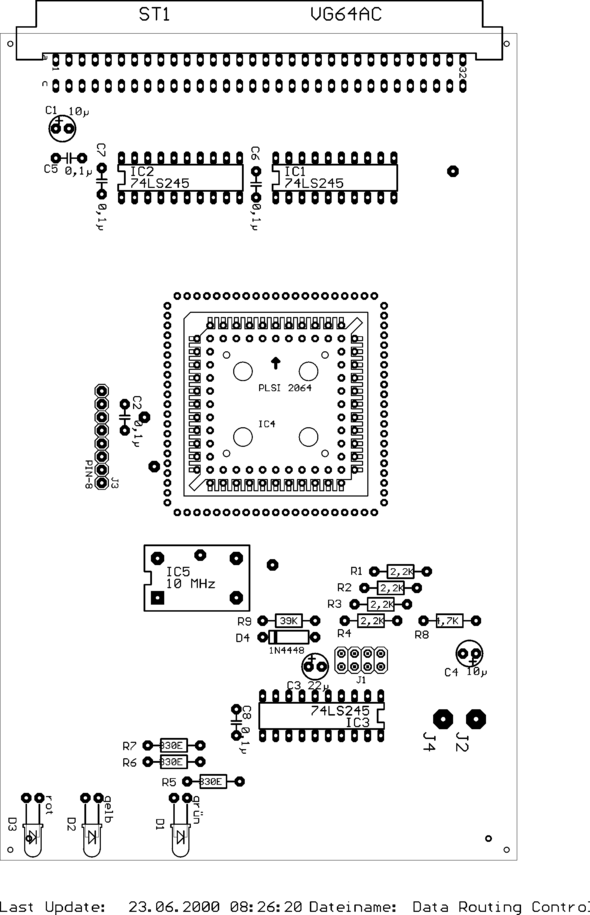
Abb. 7.3.r.2 Layout Routing-Steuerung
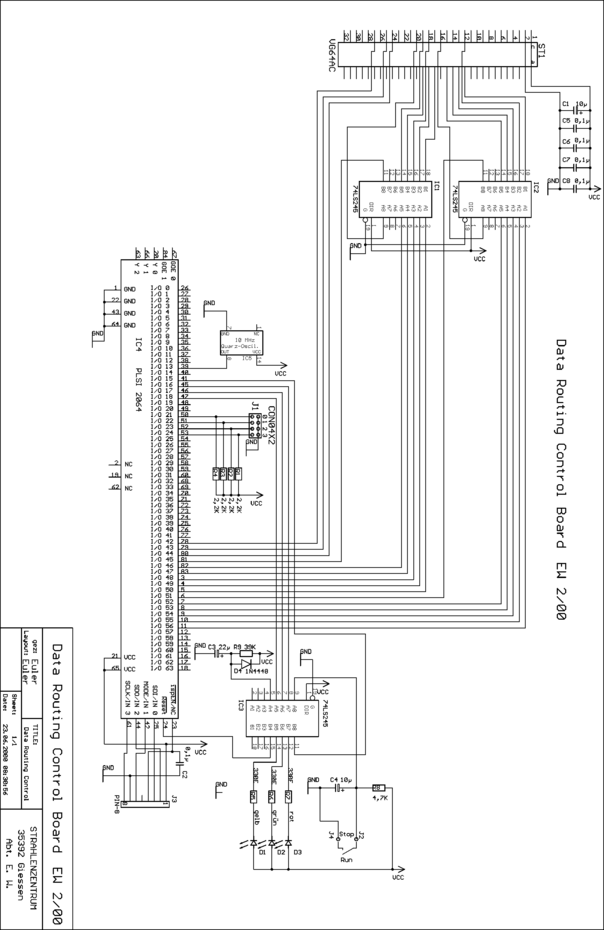
Abb. 7.3.r.1 Schaltplan Routing-Steuerung
Nächste: Board Rechner-Interface, Vorige: Board Routing-Steuerung, Nach oben: Schaltungsunterlagen [Inhalt]
Vorige: Board Rechneranpassung, Nach oben: Schaltungsunterlagen [Inhalt]
Vorige: Technische Details, Nach oben: Top [Inhalt]
| • Alte Routing-Steuerung | ||
| • Alte Rechneranpassungen |
Nächste: Alte Rechneranpassungen, Nach oben: Oldies [Inhalt]
Diese Variante der Routing-Steuerung war an TR86-, PDP11- und VME-Systemen im Einsatz. Sie ist inzwischen durch eine Karte mit einem hochintegrierten, programmierbaren Baustein und verbesserter Funktionalität ersetzt worden.
| • Funktion | ||
| • Bedienungselemente, Anzeigen | ||
| • Schnittstellen | ||
| • Routing-Bus |
Nächste: Bedienungselemente (RSTo), Nach oben: Alte Routing-Steuerung [Inhalt]
Die Routing-Steuerung koordiniert die Eingabe der Daten von den bis zu acht anschließbaren Eingabekanälen. Ein Eingabekanal besteht aus den drei funktionellen Gruppen:
Im allgemeinen sind diese Funktionen auf getrennten Karten untergebracht, bzw. die Datenquellen können auch eigenständige Geräte am Experiment sein (z.B. spektroskopischer ADC). Es sind jedoch auch Einplatinen-Lösungen möglich, bei deren Einsatz aber unbedingt darauf geachtet werden muss, dass sie verschiedene Steckplatznummern belegen (Abb. 3.1.0.1).
Die Routing-Steuerung ist mit zwei alternativ laufenden Scannern unterschiedlicher Priorität ausgestattet, mit denen die Eingabekanäle abgefragt werden. Sie schickt zu diesem Zweck über vier Bus-Leitungen (SADRx) nacheinander die Scanner-Adressen 0-15 an alle Interface-Steuerungen. Diese vergleichen die drei höchstwertigen Bits der Scanner-Adressen mit ihrer Steckplatzadresse (PADRx), die für jeden Steckplatz fest verdrahtet ist. Bei Gleichheit gilt der Eingabekanal als angewählt und kann bei Bedarf einer Datenübertragung mit der Routing-Steuerung kommunizieren.
Der Vergleich von Scanner-Adresse und Steckplatzadresse wird von der Routing-Steuerung durch die Taktsignale TN bzw. TV freigegeben. Ist ein Eingabekanal angewählt und bereit zur Datenübertragung (ReadyQ), so teilt er dies der Routing-Steuerung durch das Signal ReadyB über den Bus mit. Dies führt nach doppelter Einsynchronisierung der Ready-Meldung (ReadyC, ReadyS) zu einem Stop des Taktgenerators, und einer Erneuerung des, wegen der Laufzeiten durch die Interface-Steuerung bereits beendeten, TN bzw. TV Signals mittels ReadyS. Ferner wird das ReadyS an die Rechneranpassung weitergegeben zur Anmeldung einer Datenübertragung. Sobald die Rechneranpassung bereit ist, ein Datenwort aufzunehmen bzw. an den Rechner weiterzuleiten, meldet sie sich mit dem Signal RequestB und veranlasst damit ein Öffnen der Datengatter des angewählten Eingabekanals (Quellen-Interface). Aus den 16 Daten-Bits, dem LFT- und Kopp-Bit und den 4 Bits der Scanner-Adresse setzt die Rechneranpassung ein Datenwort zusammen (Siehe »Rechneranpassung«.) und überträgt es zum Rechner. Der Empfang der Daten wird von der Rechneranpassung mit den Signalen AcceptedB und AcceptedR quittiert. Auf der Routing-Steuerung bewirkt nach Einsynchronisierung von AcceptedR die Rückflanke von AcceptedS ein Weiterstarten des Taktgenerators unabhängig davon ob ReadyB noch ansteht oder nicht. Die Datenquelle wird durch AcceptedB im allgemeinen zu einer Normierung veranlasst, zur Vorbereitung auf das nächste Datenwort.
Es besteht die Möglichkeit, einen oder mehrere Eingabekanäle mit Vorrang vor den anderen abfragen zu lassen. Dazu müssen diese Eingabekanäle einen Vorrangwunsch (VANM) bei der Routing-Steuerung anmelden, sobald sie bereit sind ein Datenwort zu übertragen. Diese Anmeldung kann zu jeder Zeit asynchron erfolgen. Nach jedem Scanner-Schritt TZ prüft die Routing-Steuerung die VANM-Leitung mit TUV ab und setzt den Betrieb mit dem gewünschten Scanner (Vorrang- bzw. Normal-Scanner) fort. Der jeweils ruhende Scanner behält seine Positon bei, so dass er an der unterbrochenen Stelle weiterlaufen kann. Der im Vorrangmodus arbeitende Eingabekanal muss sich des Freigabetaktes TV bedienen im Gegensatz zu TN für den Normalmodus.
Ein Stop der Routing-Steuerung kann vom Rechner her erfolgen (StopR) oder über einen Schalter auf der Frontplatte. Beide bewirken ein Anhalten des Taktgenerators. Ferner wird der Stop den Eingabekanälen mitgeteilt (StopB) und über die Interface-Steuerung den Datenquellen.
Die Scanner laufen mit 2.5MHz um, jeder Eingabekanal erhält also im Leerlauf alle 6.4us zwei Abfragen (eine mit SADR0=0 und eine mit SADR0=1). Soll ein Datenwort übertragen werden, so hält der Scanner für eine Zeit an, die im wesentlichen durch das Timing des Rechners oder der Rechneranpassung, falls diese einen FiFo Speicher besitzt, bestimmt wird (ca. 1 us).
Es ist zu beachten, dass die verschiedenen Eingabekanäle von der Routing-Steuerung nicht nach einem ’first in - first out’ Verfahren bearbeitet werden, sondern durch einen Scanner reihum abgefragt werden. Dies kann zur Folge haben, dass die einzelnen Eingabekanäle nicht in der Reihenfolge zum Rechner übertragen werden, in der sie zur Übertragung bereit waren. Die damit zusammenhängenden Probleme der Verkoppelung von Datenquellen z.B. bei Koinzidenzexperimenten sind jedoch berücksichtigt (Siehe »Kopplungskarte«.).
Da den 4 Bits der Scanner-Adresse nur 3 Bits der Steckplatzadresse gegenüberstehen, kann das niederwertigste Bit der Scanner-Adresse zur Adressierung zweier Register verwendet werden. Bei Verwendung der Standard-Interface-Steuerung (IFS-Karte) macht diese bei der Lifetime-Messung von dieser Möglichkeit Gebrauch.
Alle von außen zugeführten Signale werden sorgfältig einsynchronisiert (meistens doppelt, um Schaltspitzen durch Flankenüberschneidungen zu vermeiden), so dass sie asynchron zu den internen Vorgängen zugeführt werden können.
Nächste: Schnittstellen (RSTo), Vorige: Funktion (RSTo), Nach oben: Alte Routing-Steuerung [Inhalt]
Schalter: Run/Stop
In Stellung Stop wird die Abfrage der Eingabekanäle angehalten
durch Stoppen des Taktgenerators. An die Eingabekanäle geht
ein Stopsignal. Der Schalter ist disjunktiv (ODER) verknüpft
mit dem Stop vom Rechner.
Anzeige: Run
Wenn weder vom Rechner noch durch den Schalter Run/Stop ein
Stop erfolgt, d.h. die Routing-Steuerung läuft, so leuchtet
die Anzeige Run.
Anzeige: Ready
Solange die Routing-Steuerung den Übertragungswunsch eines
Eingabekanals (ReadyB) bearbeitet, leuchtet die Anzeige Ready.
Anzeige: Vorrang
Solange die Routing-Steuerung im Vorrangmodus arbeitet,
leuchtet die Anzeige Vorrang.
Nächste: Routing-Bus (RSTo), Vorige: Bedienungselemente (RSTo), Nach oben: Alte Routing-Steuerung [Inhalt]
Signalnamen ohne Backslash ’\’: aktiv high
Signalnamen mit Backslash ’\’: aktiv low
Ein ’^’ vor dem Signalnamen: die Routing-Steuerung ist die
Quelle des Signals
a) Schnittstelle zur Rechneranpassung
Die Routing-Steuerung verständigt sich mit der
Rechneranpassung durch einen Hand-Shake-Dialog, zum Teil über
Leitungen des Privat-Busses nach rechts. Die Routing-Steuerung
muss deshalb stets direkt links von der Rechneranpassung
stecken. Beide Karten sollten vorzugsweise ganz rechts im
Überrahmen untergebracht werden.
(Siehe »Überrahmen«.).
^ReadyS\ (Data Ready)
Mit diesem Signal wird die Rechneranpassung von der
Routing-Steuerung aufgefordert, ein Datenwort zu übernehmen.
Es steht solange an bis die Rechneranpassung AcceptedR sendet.
RequestB (Data Request)
Mit diesem Signal zeigt die Rechneranpassung dem angewählten
Eingabekanal an, dass das Datenwort auf den Bus zu schalten
ist.
AcceptedB (Data Accepted)
Mit diesem Signal quittiert die Rechneranpassung den Empfang
des Datenwortes an den Eingabekanal. Durch einen Timer auf der
Rechneranpassung wird dafür gesorgt, dass AcceptedB mindestens
1us lang ist. Diese Verlängerung (Silena-Änderung) wurde
notwendig, da z.B. der Silena-ADC eine (nicht spezifizierte)
Zeit von ca. 0.5us für ein Reset benötigt.
AcceptedR (Data Accepted)
Mit diesem Signal von der Rechneranpassung wird der
Routing-Steuerung mitgeteilt, dass die Übertragung beendet ist.
Diese nimmt ReadyS zurück und startet den aktuellen Scanner
neu.
StopR\
Stop der Routing-Steuerung durch den Rechner.
^SADR(0-3)\ (Scanner-Adresse)
Die Scanner-Adresse wird von der Rechneranpassung dem
Datenwort als Quellenkennung beigefügt (Siehe »Rechneranpassung«.).
Privat-Bus-Belegung: (Tab. 3.2.4.1)
StopR: 25c
ReadyS: 27c
b) Schnittstelle zu den Eingabekanälen
^10 MHz-Clock,-Clock\
Quarzstabilisierter 10MHz Mastertakt der Routing-Steuerung.
Tastverhältnis: 1:2
Stabilität: 10ppm
^1 MHz-Clock
vom Mastertakt abgeleiteter 1MHz-Takt.
Tastverhältnis: 1:2
^SADR(0-3)\ (Scanner-Adresse)
Scanner-Adresse (4 Bits) zur Abfrage der Eingabekanäle.
ReadyB\
Der abgefragte Eingabekanal meldet sich bei der
Routing-Steuerung mit ReadyB, falls er ein Datenwort
übertragen will.
^StopB\
Dieses Signal teilt den Eingabekanälen mit, dass die
Routing-Steuerung gestoppt wurde (manuell oder durch Rechner).
^TN, ^TV
Freigabetakte für den Adressvergleich auf den
Interface-Steuerungen für Normal- (TN) bzw.
Vorrangmodus (TV).
VANM\
Anmeldung eines vorrangigen Bearbeitungswunsches bei der
Routing-Steuerung durch die Eingabekanäle.
Vorige: Schnittstellen (RSTo), Nach oben: Alte Routing-Steuerung [Inhalt]
Der Routing-Bus (Tab. 3.2.4.1) besteht aus zwei Teilen, dem ’Allgemeinen Bus’, der über die ganze Breite des Überrahmens geht und dem ’Privat-Bus’, der erst durch das Stecken benachbarter Karten entsteht und auf diese begrenzt ist.
Allgemeiner Bus (A-Bus)
Der allgemeine Bus belegt die Anschlüsse 1a, 1c usw. bis 21c
(Tab. 3.2.4.1). Die Anschlüsse mit dem Suffix a und c führen
im Gegensatz zum Privat-Bus zu verschiedenen Bus-Leitungen und
dürfen nicht gebrückt werden.
Stromversorgung (Standard):
+ 5V / 10A +15V / 1A -15V / 1A
DO - D15 (Datenleitungen):
Sechszehn Datenleitungen stehen zur Verfügung. Low auf einer
Leitung bedeutet, dass das Daten-Bit gesetzt ist. Offene
Leitung heißt, das Daten-Bit ist nicht gesetzt.
Kopp-, LFT-Bit:
Diese beiden Bits sind Kennungs-Bits, die von den Interfaces
gesetzt werden können. Die Standard-Interface-Steuerung
(IFS-Karte) nutzt sie zur Anzeige von gekoppelten Daten bzw.
bei der Lifetime-Messung.
10 MHz-Clock/-Clock\:
Quarzstabilisierter Mastertakt der Routing-Steuerung.
Tastverhältnis: 1:2
Stabilität: 10ppm
1 MHz-Clock:
Vom Mastertakt abgeleiteter 1MHz Takt.
Tastverhältnis: 1:2
PADR(1-3) (Steckplatzadresse):
Für jeweils zwei benachbarte Steckplätze ist eine gemeinsame
Steckplatzadresse 0-7 verdrahtet (Abb. 2.0.0.1). Die
Interface-Steuerungen müssen so gesteckt werden, dass sie
verschiedene Adressen einnehmen, da sie nur dann eindeutig zu
adressieren sind.
SADR(0-3) (Scanner-Adresse):
Ein Steckplatz gilt als angewählt, wenn die Bits 1-3 von
Steckplatz- und Scanner-Adresse übereinstimmen. Nur dann darf
die Interface-Steuerung mit der Routing-Steuerung in Kontakt
treten. Das Bit SADR0 erlaubt noch das Ansprechen zweier
unterschiedlicher Datenregister eines Eingabekanals. Die
Scanner-Adresse wird den übertragenen Daten von der
Rechneranpassung als Quellenkennung beigefügt, um sie
unterscheidbar zu machen (Siehe »Rechneranpassung«.).
TN, TV (Freigabetakte für den Adressvergleich):
TN, TV erscheinen verzögert zu der Scanner-Adresse, so
dass sichergestellt ist, dass die Adress-Bits eingeschwungen sind und
keine Vergleichsfehler auftreten können. Ferner ermöglichen
TN,TV eine Unterscheidung welcher der beiden Scanner
unterschiedlicher Priorität gerade aktiv ist.
TN: Normal-Scanner TV: Vorrang-Scanner
VANM (Vorrang Anmeldung):
Über diese Leitung kann bei der Routing-Steuerung ein
vorrangiger Bearbeitungswunsch angemeldet werden. Die
Routing-Steuerung fragt in einer bestimmten Phase jedes
Scan-Zyklus (Abb. 3.2.4.6) diese Leitung ab und schaltet auf
den gewünschten Scanner.
ReadyB (Data ready); RequestB (Data request);
AcceptedB (Data accepted)
Mit diesen drei Signalen synchronisiert sich die
Datenübertragung eines vom Scanner angewählten Eingabekanals.
Die Interface-Steuerung meldet ReadyB, falls sie Daten
übertragen will. Dies hat ein Stoppen des Scanners zur Folge.
Mit RequestB wird die Datenquelle aufgefordert die Daten auf
den Bus zu geben. Beendet wird die Übertragung mit AcceptedB.
Mit diesem Signal wird im allgemeinen auch die Datenquelle
gecleart, die dann das nächste Datenwort aufnehmen kann.
StopB:
Dieses Signal teilt allen Eingabekanälen gleichzeitig mit, dass
die Routing-Steuerung gestoppt wurde.
Privat-Bus (P-Bus) Der Privat-Bus baut sich erst durch Stecken der Karten auf. Eine fehlende Karte oder das Fehlen entsprechender Brücken auf den Karten unterbrechen den Privat-Bus. Er reicht von den Leitungen 22 bis 32 einschließlich. Die Leitungen mit dem Suffix a führen zur linken Nachbarkarte und die mit c zur rechten. Soll ein Bus aufgebaut werden, so sind die Anschlüsse a und c einer Leitung zu brücken. Die individuelle Nutzung des Privat-Busses ist den einzelnen Kartenbeschreibungen zu entnehmen (z.B. RST-, IFS-, KPL- Karten).
Tab. 8.1.4.1 Data-Routing-Bus
a Pin c
----------------------------------------------------------
Spannungs- (digital) +5V 1 +5V (digital) Spannungs-
Versorgung (digital) 0V 2 0V (digital) Versorgung
----------------------------------------------------------
D0\ 3 D1\
D2\ 4 D3\
D4\ 5 D5\
D6\ 6 D7\
D8\ 7 D9\
D10\ 8 D11\
D12\ 9 D13\
D14\ 10 D15\
A-Bus Kopp-Bit\ 11 LFT-Bit\ A-Bus
SADR0\ 12 1MHz-Clock
SADR1\ 13 PADR1\
SADR2\ 14 PADR2\
SADR3\ 15 PADR3\
RequestB 16 ReadyB\
StopB\ 17 AcceptedB
10MHz-Clock\ 18 10MHz-Clock
TV 19 TN
(analog) 0V 20 VANM\
(analog) +15V 21 -15V (analog)
----------------------------------------------------------
22
23
24
25
P-Bus 26 P-Bus
27
28
29
30
31
32
----------------------------------------------------------
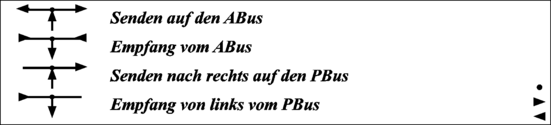
Abb. 8.1.4.2 Symbole in den Blockdiagrammen (Abb. 8.1.4.3 - 8.1.4.5)
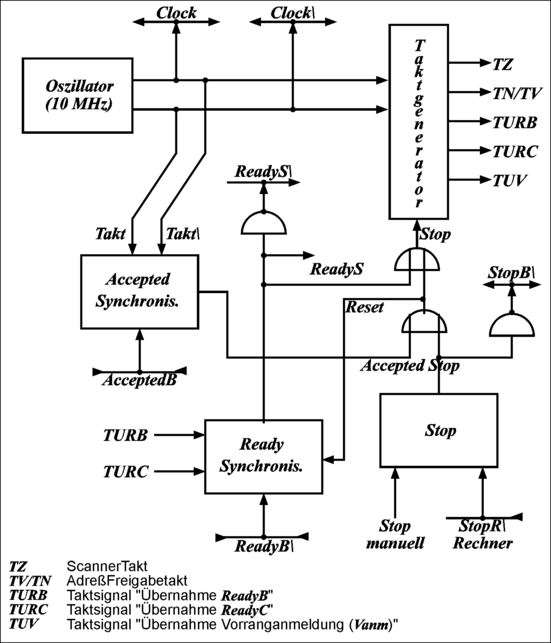
Abb. 8.1.4.3 Routing-Steuerung Taktgenerator
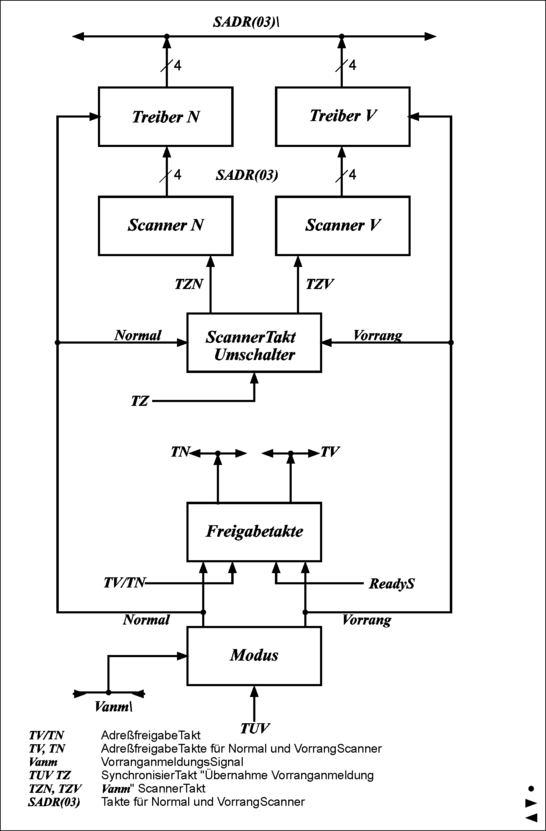
Abb. 8.1.4.4 Routing-Steuerung Scanner
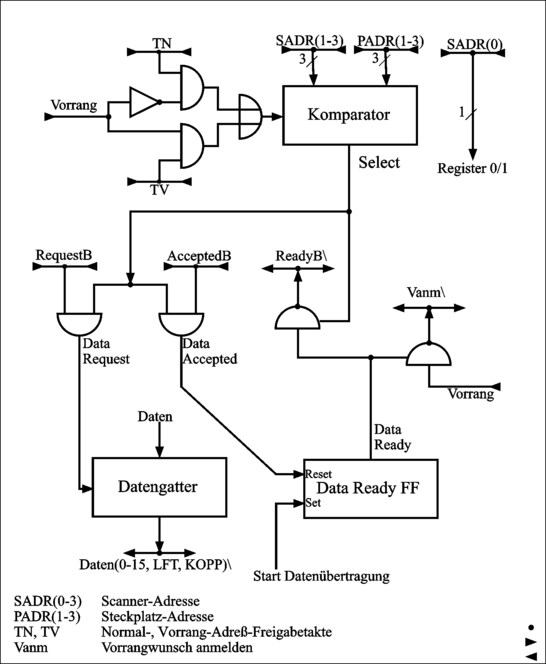
Abb. 8.1.4.5 Interface-Steuerung
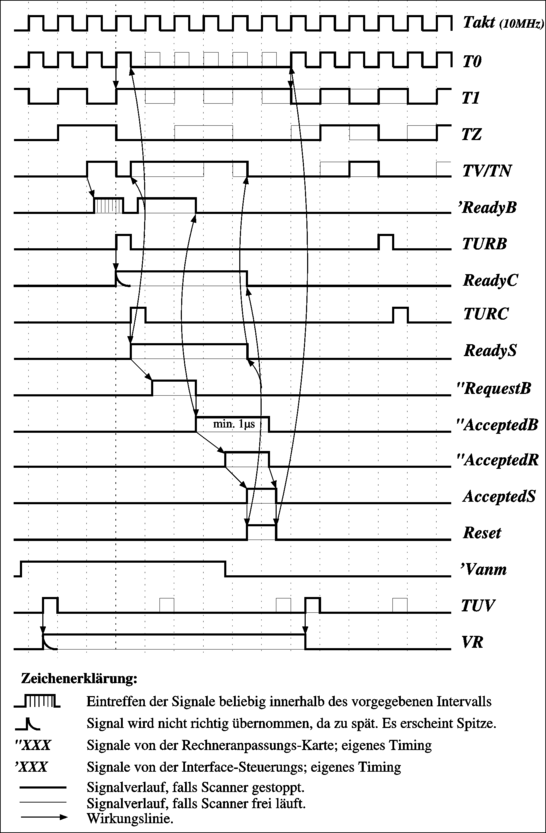
Abb. 8.1.4.6 Timing Routing-Steuerung
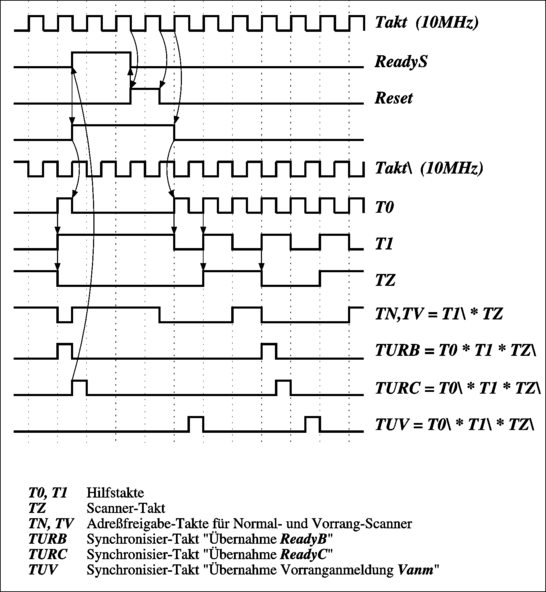
Abb. 8.1.4.7 Timing Taktgenerator
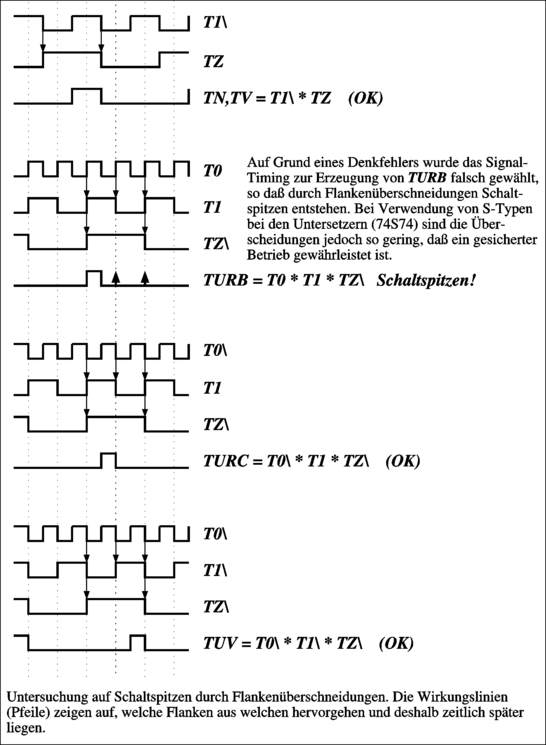
Abb. 8.1.4.8 Timing-Details Taktgenerator
Vorige: Alte Routing-Steuerung, Nach oben: Oldies [Inhalt]
| • PDP11 - DRQ11-CA - Anpassung | ||
| • TR86 - CALAS - Anpassung |
Nächste: TR86 - CALAS - Anpassung, Nach oben: Alte Rechneranpassungen [Inhalt]
Aufbau der Datenwörter
Es werden die 16 Daten-Bits der Eingabedaten, die 4
Scanner-Adress-Bits, das Lifetime-Bit und das Kopplungs-Bit auf
zwei 16 Bit Eingabeworte aufgeteilt und mit je einem
Wortkennungs-Bit versehen (Tab. 8.2.1.1). Die
Wortkennungs-Bits erlauben der Software die Unterscheidung von
erstem und zweitem Eingabewort und damit die Erkennung von
Datenverlusten.
Tab. 8.2.1.1 Aufbau der Datenwörter (PDP11) Bit Wort 1 Wort 2 0 D8 D0 1 D9 D1 2 D10 D2 3 D11 D3 4 D12 D4 5 D13 D5 6 D14 D6 7 D15 D7 8 H SADR1 9 H SADR2 D0...15 Bits der Eingabedaten 10 H SDAR3 SADR0...3 Scanner-Adress-Bits 11 H H LFT Lifetime-Bit 12 H SADR0 KOPP Kopplungs-Bit 13 H LFT H High-Pegel = "0" 14 H KOPP L Low-Pegel = "1" 15 L H Bit 15 Wortkennungs-Bit
Vorige: PDP11 - DRQ11-CA - Anpassung, Nach oben: Alte Rechneranpassungen [Inhalt]
Von dieser inzwischen ersetzten Rechneranpassung existiert noch eine Reihe von Karten, deren spätere Verwendung z.B. an einem PC wegen ihrer einfachen Schnittstellen-Logik denkbar wäre. Deshalb wurde ihre ausführliche Beschreibung erhalten. Bei ihrem Einsatz muss jedoch die sogenannte Silena-Änderung auf der Routing-Steuerung berücksichtigt werden (s.h. Schaltungs-Unterlagen für PDP11-Rechneranpassung).
Zwei Varianten dieser Rechneranpassungs-Karte wurden entwickelt. Eine leitet die Datenworte unmittelbar, lediglich durch Leitungstreiber verstärkt zum Rechner weiter. Die andere schiebt die Datenworte zuerst durch einen 24 Bit breiten und 64 Worte tiefen FiFo-Speicher. Der Füllstand des FiFo-Speichers wird durch LED’s angezeigt und steht über Ausgänge zur Steuerung des Experimentes zur Verfügung. Der Einsatz dieser Karte ist angebracht, wenn die Daten stoßweise auftreten, jedoch nicht mehr als 64 Datenworte auf einmal. Bei statistisch ankommenden Daten ist ihr Einsatz von geringer Wirkung, falls die nachfolgende Rechner-Elektronik durch einige Speicherregister die statistischen Spitzen bereits weitgehend ausglättet.
Funktion
Die Rechneranpassungs-Karte sorgt mittels 74LS245 für das
Senden und Empfangen von Daten und Steuersignalen über das
Kabel zwischen Routing und Rechner. Die Schnittstelle zum
Rechner besteht aus 21 Datenleitungen und 4 Steuerleitungen,
über die ein einfacher ’Hand-Shake-Dialog’ abläuft (Abb.
8.2.2.1).
Mit dem Signal Data Ready meldet das Routing dem Rechner, dass Daten bereit stehen zur Übergabe. Der Rechner fordert die Daten mit Data Request an und quittiert deren Übernahme mit Data Accepted, worauf das Routing das Data Ready zurücknimmt und nach Beendigung von Data Accepted zum nächsten Eingabekanal weitergeht.
Zu diesen drei Hand-Shake-Signalen kommt noch ein Stop-Signal hinzu, mit dem der Rechner mitteilt, dass die Datenübertragung gestoppt ist.
Kritisch ist der Augenblick, in dem die Daten-Bits durchgeschaltet werden. Dies führt durch Übersprechen auf die Steuerleitungen durchweg zu erheblichen Störungsspitzen. Zwar sind die Polaritäten der Steuersignale so gewählt, dass diese Störungen keinen Einfluss auf die Funktion haben sollten, in der Praxis war dies jedoch nicht ausreichend. Folgende Effekte konnten beobachtet werden:
Zur Unterdrückung dieser Effekte wurden Data Accepted und Data Request gegeneinander verriegelt. Jedes dieser Steuersignale kann nur durchkommen, wenn das andere nicht ansteht (nicht bei FiFo-Version und älteren Rechneranpassungs-Karten). Ferner wurden alle Steuerleitungen mit pull-up bzw. pull-down Widerständen und Kondensatoren belastet, um Störungen zu vermindern.
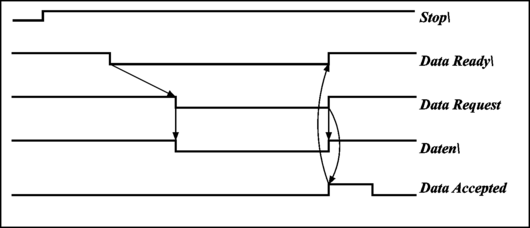
Abb. 8.2.2.1 Timing zwischen Routing und Rechner (CALAS)
Aufbau des Datenwortes
Die Zusammenstellung des Datenwortes ist für beide Varianten
der Rechneranpassungs-Karte gleich und der CALAS-Elektronik
angepasst (Tab. 8.2.2.2). Die CALAS-Elektronik kennt 16
Daten-Bits (0-15), 7 Quellenkennungs-Bits (16-22) und ein
Fehlerkennungs-Bit (23), mit dem das CALAS Übertragungsfehler
anzeigt. Entsprechend überträgt die Rechneranpassungs-Karte 16
Daten-Bits, jedoch nur 5 Kennungs-Bits (3 Steckplatzadressen,
Lifetime-Bit, Kopplungs-Bit). Mit den verbleibenden zwei
Kennungs-Bits (CC-Kennung) kann die CALAS-Elektronik
verschiedene direkt angeschlossene Datenquellen (z.B.
Routings) unterscheiden.
Als Kennungs-Bits werden die drei höchstwertigen Bits der Scanner-Adresse (SADR(1-3)=Steckplatzadresse), sowie die den Datenquellen verfügbaren Bits Lifetime-Bit (LFT-Bit) und Kopplungs-Bit (Kopp-Bit) übertragen. Die tatsächliche Anordnung der Bits im Datenwort hängt noch von der Verdrahtung im Rechner ab. Eine Standardverdrahtung zeigt die folgende Tabelle:
Tab. 8.2.2.2 Aufbau eines Datenwortes (CALAS)
Verdrahtungsvariante 1:
23 22 16 15 0
---------------------------------------
| 0 | P P P C C L K | X.............X |
---------------------------------------
7 Kennungs-Bits 16 Daten-Bits
CC: 00: direkt angeschlossene Datenquellen (z.B. Testkarte '02'H)
01:
10: Routing oder direkte Datenquellen
11:
Verdrahtungsvariante 2:
23 22 16 15 0
---------------------------------------
| 0 | P P P L K C C | X.............X |
---------------------------------------
7 Kennungs-Bits 16 Daten-Bits
CC: 10: direkt angeschlossene Datenquellen (z.B. Testkarte '02'H)
00:
01: Routing oder direkte Datenquellen
11:
PPP: Steckplatz der Datenquelle
L: Lifetime-Bit
K: Kopplungs-Bit
Variante mit FiFo-Speicher
Die Daten werden vom Routing entgegengenommen, durch einen 64
Worte tiefen und 24 Bit breiten FiFo-Speicher geschoben und
anschliessend an den Rechner übergeben. Die Ein- und Ausgaben
beim FiFo-Speicher laufen asynchron zueinander. Mit jeder
Eingabe (Ready) und jeder Ausgabe (Accepted) wird ein Zähler
hoch- bzw. runtergezählt zur Registrierung des Füllstandes des
FiFo. Aus den drei Bits der Wertigkeit 16, 32, und 64 werden
Signale abgeleitet, die den Füllstand anzeigen. Mit dem
Stop-Signal (manuell oder Rechner) werden FiFo und Zähler
gelöscht, um einen definierten Anfangszustand zu schaffen.
Anzeigen: 1/4 - 1/1 (LED’s)
Über vier LED’s wird der Füllstand des FiFo (1/4, 1/2, 3/4,
1/1) angezeigt. Eine LED, die leuchtet, zeigt an, dass der FiFo
mindestens bis zu dem zugehörigen Wert gefüllt ist.
Anzeige belegt
1/4 16-31
1/2 32-47
3/4 48-63
1/1 64
BNC-Buchsen: 0, 1/4, 1/2, 3/4 (TTL-Ausgänge) Zur Steuerung des Experimentes können diesen Ausgängen Signale entnommen werden, die anzeigen wieviel freie Plätze im FiFo-Speicher mindestens noch frei sind.
Ausgang high min. frei
0 0
1/4 16
1/2 32
3/4 48
Simulatorkarte
Die Simulatorkarte ermöglicht das Testen einer Routing-Station
ohne deren Anschluss an einen Rechner. Sie wickelt mit dem
Routing den notwendigen Hand-Shake-Dialog ab, wertet die
übergebenen Daten jedoch nicht aus. Die Breite der
Hand-Shake-Signale Data Request und Data Accepted kann über
Potentiometer auf der Karte eingestellt werden.
(Die PDP11-DRQ11 Anpassung führt diesen Test selbständig aus,
wenn die Verbindung zum Rechner offen ist.)
Die Simulatorkarte kann in zwei Modi betrieben werden, die auf der Karte durch Schalter einzustellen sind: