
[Inhalt]
(Schnittstelle zur Experimentkontrolle)
April 1995 K. Huber, Strahlenzentrum Univ. Gießen
Version 11.Oct.2024
| • Einleitung | ||
| • Aufbau und Funktion | ||
| • Standardkomponenten | ||
| • Standard-Interface-Karten | ||
| • Spezielle Interface-Karten | ||
| • Zählratenstatistik | ||
| • Technische Details | ||
| • Oldies |
Nächste: Aufbau und Funktion, Nach oben: Top [Inhalt]
Zur Datenerfassung und Experimentsteuerung existieren zwei verschiedene Rechner-Interfaces, das Data-Routing und das Control-Routing, so genannt nach den Aufgaben, zu denen sie im Wesentlichen eingesetzt werden:
Die vorliegende Funktionsbeschreibung befasst sich
ausschließlich mit dem Control-Routing. Es wird im folgenden oft
abgekürzt als Routing bezeichnet.
Für das Data-Routing existiert eine eigene Beschreibung.
Das Kapitel Aufbau und Funktion gibt einen Überblick über den Aufbau des Control-Routing.
Das Kapitel Standardkomponenten enthält die Aufgabenbeschreibungen und Bedienungsanleitungen der Standardkarten des Routing.
Das Kapitel Standard-Interface-Karten enthält die Aufgabenbeschreibungen und Bedienungsanleitungen der Routing-Karten, die allgemein bei Experimenten zum Einsatz kommen.
Das Kapitel Spezielle Interface-Karten enthält eine Aufstellung der Routing-Karten, die für einzelne Experimente entwickelt wurden. Ihre Beschreibung findet man i.a. in den Unterlagen der Experimente, bei denen sie eingesetzt werden.
Das Kapitel Technische Details gibt technische Detail-Informationen über die Komponenten und deren Schnittstellen.
Im Kapitel Oldies sind überholte Beschreibungen gesammelt.
Nächste: Standardkomponenten, Vorige: Einleitung, Nach oben: Top [Inhalt]
| • Aufbau des Routing | ||
| • Überrahmen |
Nächste: Ueberrahmen, Nach oben: Aufbau und Funktion [Inhalt]
Abb.: Datentransfer mit dem Control-Routing-System
Vorige: Aufbau des Routing, Nach oben: Aufbau und Funktion [Inhalt]
Das Control-Routing ist in einem 19"-Überrahmen untergebracht
mit 20 Steckplätzen für Europakarten
(Siehe Abb Routing-Ueberrahmen.).
Es wird der
gleiche Überrahmen wie für das Data-Routing verwendet. In
Ausnahmefällen können Data-Routing und Control-Routing im gleichen
Überrahmen untergebracht werden, wenn die Bus-Verdrahtung in
der Mitte durchtrennt wird und für die zweite Hälfte ein
Bus-Abschluss nachgerüstet wird.
Die Routing Back-Plane enthält 42 allgemeine Bus-Leitungen für
die Routing-Steuerung und 11 Privat-Bus-Leitungen zur
Kommunikation benachbarter Karten.
Außer der Spannungsversorgung sind alle Schaltungskomponenten
auf steckbaren Karten untergebracht.
Als Steckverbindung zum Routing-Bus werden 64-polige VG-Stecker verwendet. Die Anschlüsse der VG-Leisten sind im Überrahmen zum Teil als durchgehender Bus verdrahtet (allg. Bus: 1a,1c,...,21c) und zu einem anderen Teil bestehen Verbindungen zu benachbarten Steckerleisten (Privat-Bus: 22a/c,...,32a/c) (Siehe Routing-Bus.). Ferner ist für jede Leiste von links beginnend eine Steckplatzkodierung von 0-7 verdrahtet, wobei jedoch jeweils zwei benachbarte Leisten die gleiche Kodierung haben. Die vier überbleibenden Steckplätze am rechten Ende erhalten alle die Kodierung 7. Sie sind vorzugsweise für die Rechner-Anpassung und Routing-Steuerung zu benutzen, da der Bus-Abschluss sich am linken Ende des Überrahmens befindet. Am äußersten rechten Ende ist die Netzkarte mit Netzschalter und Betriebsspannungsanzeigen fest installiert.
Die Frontplattenbreite für eine Steckkarte ist üblicherweise 20 mm, es stehen jedoch auch 40 und 50 mm Frontplatten zur Verfügung.
Achtung:
Es wird dringend empfohlen, die Frontplatten der Steckkarten
mit dem Überrahmen zu verschrauben zur Vermeidung von
Betriebsstörungen. Bitte die Schrauben nicht gewaltsam
anziehen, da dies zur Zerstörung der Gewinde im Überrahmen
führt. Schrauben von min. 10mm Länge verwenden, sonst besteht
ebenfalls die Gefahr der Zerstörung der Gewinde.
Abb.: Routing-Überrahmen
Steckplatz
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+
| | | | | | | | | | | | | | | | | | |RS|RA|SV|
| | | | | | | | | | | | | | | | | | | | | |
| | | | | | | | | | | | | | | | | | | | | |
| | | | | | | | | | | | | | | | | | | | | |
+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+--+
0 0 1 1 2 2 3 3 4 4 5 5 6 6 7 7 7 7 7 7
Steckplatzkodierung
RS = Routingsteuerung
RA = Rechneranpassung
SV = Spannungsversorgung
Nächste: Standard-Interface-Karten, Vorige: Aufbau und Funktion, Nach oben: Top [Inhalt]
| • Rechneranpassung und Routing-Steuerung | ||
| • Address-Decoder |
Nächste: Address-Decoder, Nach oben: Standardkomponenten [Inhalt]
Diese beiden Funktionen sind entweder auf einer gemeinsamen Karte oder auf zwei benachbarten Karten, mit der Steuerung links und der Anpassung rechts, untergebracht.
| • Rechneranpassung | ||
| • Routing-Steuerung |
Nächste: Routing-Steuerung, Nach oben: Rechneranpassung und Routing-Steuerung [Inhalt]
Die Rechneranpassungs-Karte enthält Sender, Empfänger und eventuell Pegelwandler für die Dialog- und Datenleitungen zwischen dem Rechner und dem Routing.
Bisher wurden drei Anpassungen an verschiedene Host-Rechner realisiert:
Vorige: Rechneranpassung, Nach oben: Rechneranpassung und Routing-Steuerung [Inhalt]
Die Routing-Steuerung ist das logische Interface zwischen den
rechnerseitigen Signalen und dem Routing-Bus. Sie kontrolliert
den Datentransfer mit den Registern der Experiment-Interfaces
und sammelt deren Interruptanforderungen, um sie an den Rechner
weiterzuleiten.
Die Control-Routing-Steuerung besitzt keine Bedienungselemente.
Siehe Aufbau des Routing.
Siehe Komponenten und Schnittstellen.
Vorige: Rechneranpassung und Routing-Steuerung, Nach oben: Standardkomponenten [Inhalt]
Zur Erleichterung des Anschlusses von Experiment-Interfaces wurde eine standardisierte Karte zur Entschlüsselung der binär verschlüsselten Modul- und Register-Adressen entwickelt. Die Address-Decoder-Karte belegt eine Steckplatz abhängige Moduladresse (3 Bits) und entschlüsselt die zugehörigen Registeradressen (3 Bits). Über den P-Bus (VG-Stecker Pins 22c - 29c; Siehe Routing-Bus.) gibt sie 8 Register-Select-Signale an rechts nachfolgende Experiment-Interfaces weiter. Ihr Einsatz kann entfallen, wenn die Experiment-Interfaces die Entschlüsselung selber vornehmen.
Sobald das Signal "Address valid" anliegt, vergleicht die Address-Decoder-Karte ihre Steckplatzadresse PADR<0-2> mit der aktuellen Moduladresse MADR<0-2>. Bei Gleichheit aktiviert sie einen 3 zu 8 Demultiplexer, der aus der codierten Registeradresse RADR<0-2> 8 einzelne Register-Select-Signale erzeugt (Siehe Aufbau des Routing.), die sie über den P-Bus (Siehe Routing-Bus.) den benachbarten Experiment-Interfaces zur Verfügung stellt.
Die über den P-Bus angeschlossenen Experiment-Interfaces nutzen die Register-Select-Signale zusammen mit den Routing-Bus-Signalen "Enable Read", "Data Accepted" und "Data Available" zur Steuerung der Ein- und Ausgabe von Daten.
Es existieren zwei Versionen der Address-Decoder-Karte, die sich in den Bedienungselementen und Anzeigen und zum Teil auch in der Funktion unterscheiden:
Bedienungselemente:
alte Version:
Schalter: Run/Stop
Run : Die Address-Decodierung ist in Betrieb
Stop: Die Address-Decodierung ist außer Betrieb und alle
Register-Select-Signale sind abgeschaltet (high).
neue Version: keine Bedienungselemente
Anzeigen:
alte Version:
LED : Select
LED leuchtet: Address-Decoder-Karte ist durch Moduladresse selektiert
LEDs: 4 2 1
Anzeige der Steckplatzadresse
LED leuchtet: Bit der angegebenen Wertigkeit ist gesetzt
neue Version:
LEDs: 0 1 2 3 4 5 6 7
Register select
LED n leuchtet: Register n ist selektiert
LEDs: 4 2 1
Anzeige der Steckplatzadresse
LED leuchtet: Bit der angegebenen Wertigkeit ist gesetzt
Funktionelle Unterschiede:
alte Version:
Ursprünglich war geplant, dass das "Address_Error"-Signal
(Routing-Bus VG-Stecker Pin 16c) von jedem Experiment-Interface
gelöscht wird, dessen Register adressiert werden. Tatsächlich
wurde jedoch auf der alten Address-Decoder-Version "Address_Error"
bereits gelöscht, wenn diese über die Moduladresse angesprochen
wurde, und die Experiment-Interfaces haben möglicherweise
das "Address_Error"-Signal nicht bedient. Damit kann jedoch
die Software nicht feststellen, ob eine benötigte
Experiment-Interface-Karte fehlt oder defekt ist. Durch
Auftrennen der Verbindung nach Pin 16c auf dem Address-Decoder
ist diese Panne zu beheben. Dann müssen gegebenenfalls
aber die Experiment-Interfaces nachgerüstet werden (s.u.).
neue Version:
Die neue Address-Decoder Version überlässt das Löschen des
"Address_Error"-Signals den Experiment-Interfaces, die dann
zum Teil
aber nachgerüstet werden müssen (teilweise bereits
geschehen), falls die Software "Address_Error" abprüft.
Nachrüstung:
Als Nachrüstung genügt eine Diode vom Eingang der
verwendeten "Register Select"-Signale zum Ausgang
des "Address_Error"-Signals, z.B.:
22c ---|<|--- 16c
Nächste: Spezielle Interface-Karten, Vorige: Standardkomponenten, Nach oben: Top [Inhalt]
Nächste: Serielle Ausgabe, Nach oben: Standard-Interface-Karten [Inhalt]
Dieses PSO14 Control Routing Board ist ein neuentwickelter Parallel-Seriell-Wandler mit Ausgabe der seriellen Signale über Lichtleiter, der die G. Hoffmann Wandler zur Steuerung der Netzgeräte der neuen e-Kanone im Labor 017 ersetzt. Er kann mit unterschiedlicher Firmware programmiert werden um damit die alten Hofmann-Module (z.B. DAC-Karten) steuern zu können oder die neuentwickelten, seriellen AD5541CR oder LTC2758 DAC-Karten.
| • Serielle Protokolle | ||
| • PSO2 Firmware | ||
| • PSO32 Firmware | ||
| • LWL-Planung | ||
| • Probleme und Lösungen |
Nächste: PSO2 Firmware, Nach oben: Serielle Ausgabe (PSO14) [Inhalt]
| • Original Hofmann Protokoll | ||
| • Modifizierte Hofmann Protokolle | ||
| • PSO16/32 Protokolle |
Nächste: MHProtokoll, Nach oben: Protokolle (PSO14) [Inhalt]
Im Hofmann Protokoll wiederholen die PSO-Karten nach einer kurzen
Pause beständig ihre Ausgabe. Nach dem Anschalten starten die Karten
sofort mit der Ausgabe der zunächst undefinierten Information.
Erhalten sie über das Control Routing neue Daten so wird die
laufende Ausgabe abgebrochen und eine neue wird gestartet.
Der serielle Empfänger erkennt den Abbruch und verwirft die unvollständigen
Daten. Dies führt bei zu rasch aufeinander folgender Eingabe neuer Daten
dazu, dass die serielle Ausgabe niemals fertig wird.
Die serielle Ausgabe wird mit 32.768kHz oder 2.4576 MHz getaktet. Ein Bit ist 8 Takte lang. Nach 16 Bits oder einem Abbruch folgt eine 8 Takte lange Pause. Bit = 0: 1 1 0 0 0 0 0 0 Bit = 1: 1 1 1 1 1 0 0 0 Pause : 0 0 0 0 0 0 0 0 LSB wird zuerst gesendet.
Nächste: PSO16/32 Protokolle, Vorige: OHProtokoll, Nach oben: Protokolle (PSO14) [Inhalt]
Es stehen zwei leicht unterschiedliche Versionen zur Verfügung, mit denen versucht wird die Schwächen des Originals zu umgehen:
Die serielle Ausgabe wird nur mit 2.4576 MHz getaktet. Ein Bit ist 8 Takte lang. Nach 16 Bits oder einem Abbruch folgt eine 8 Takte lange Pause. Bit = 0: 1 1 0 0 0 0 0 0 Bit = 1: 1 1 1 1 1 0 0 0 Pause : 0 0 0 0 0 0 0 0 LSB wird zuerst gesendet.
Vorige: MHProtokoll, Nach oben: Protokolle (PSO14) [Inhalt]
Die PSO16/32 Protokolle übertragen 16 bzw. 32 Bit serielle Daten. Sie werden zum Steuern der neuen AD5541CR (16 Bit) und LTC2758 DAC-Karten (32 Bit) benötigt. Sie sind NICHT kompatibel mit vorhandenen Hofmann DAC-Karten.
Bit-Takt: 2.5000 MHz Header : 101010101010101 Daten : xxxxxxxxxxxxxxxx/xxxxxxxxxxxxxxxx
Nächste: PSO32 Firmware, Vorige: Protokolle (PSO14), Nach oben: Serielle Ausgabe (PSO14) [Inhalt]
Mit der PSO2 Firmware können die beiden LWL-Sender unabhängig von einander programmiert und betrieben werden. Die PSO2 Firmware existiert in zwei Versionen (PSO2V1 und PSO2V4) mit den unterschiedlichen, modifizierten Hofmann Protokollen PSO2V1 bzw. PSO2V4. Jede dieser Versionen kann durch Steckbrücken für einen Hofmann kompatiblen Modus (MODE = old) oder einen AD5541CR DAC-Karten kompatiblen Modus (MODE = new) konfiguriert werden.
| • Bedienelemente (PSO2) | ||
| • Programmierung (PSO2) |
Nächste: Programmierung (PSO2), Nach oben: PSO2 Firmware [Inhalt]
LED "Busy " : Anzeige einer Schreiboperation LWL-Buchse 0 : serieller Lichtleiter-Ausgang 0 LWL-Buchse 1 : serieller Lichtleiter-Ausgang 1 Brücke Mode 0: Stecker für Modus old/new Kanal 0 Brücke Mode 1: Stecker für Modus old/new Kanal 1 TP Word 0 : Triggersignal für Start einer seriellen Ausgabe 0 TP Bit 0 : Triggersignal für Bits einer seriellen Ausgabe 0 TP Word 1 : Triggersignal für Start einer seriellen Ausgabe 1 TP Bit 1 : Triggersignal für Bits einer seriellen Ausgabe 1
Vorige: Bedienelemente (PSO2), Nach oben: PSO2 Firmware [Inhalt]
Mit der PSO2 Firmware belegt die PSO14-Karte zwei Registeradressen des Address-Decoders mit doppelter Funktion:
Register 0 : Statusabfrage Kanal 0 / Ausgabe Datenwort Kanal 0 Register 1 : Statusabfrage Kanal 1 / Ausgabe Datenwort Kanal 1
Statusabfrage:
Beim Adressieren des Registers antwortet der zugeordnete
Kanal nur mit einem Address-Accepted (AddAcc) wenn er nicht busy ist.
Dieses Signal kann über den Routing-Status abgefragt werden:
Eingabe ((Routing Status & 0x0008) != 0) -> Kanal busy
Diese Statusabfrage ist nur bei Verwendung einer neuen Address-Decoder-Karte (EW 3/04) möglich da die alten (EW 21-88) ebenfalls dieses Bit bedienen (Siehe Address-Decoder.). Auf den alten gegebenenfalls die 16c-Verbindung zum VG-Stecker auftrennen. Für Interface-Karten, die AddAcc nicht bedienen führt dies aber zu einer Fehlermeldung falls die Software AddAcc abprüft!
Daten Ausgabe:
Die 16 Daten-Bits werden in dem zugeordneten Datenregister gespeichert
und die Parallel-Seriell-Wandlung gestartet.
Nächste: LWL-Planung (PSO14), Vorige: PSO2 Firmware, Nach oben: Serielle Ausgabe (PSO14) [Inhalt]
Mit der PSO32 Firmware können die beiden LWL-Sender unabhängig von einander für das PSO16 oder PSO32 Protokoll programmiert und betrieben werden zur Kontrolle der neuen AD5541CR (16 Bit) und LTC2758 DAC-Karten (32 Bit). Da geplant ist, die AD5541CR-Karten auf das 32 Bit Protokoll umzuprogrammieren, wird das 16 Bit Protokoll möglicherweise in Zukunft nicht mehr gebraucht...
| • Bedienelemente (PSO32) | ||
| • Programmierung (PSO32) |
Nächste: Programmierung (PSO32), Nach oben: PSO32 Firmware [Inhalt]
LED "Busy " : Anzeige einer Schreiboperation LWL-Buchse 0 : serieller Lichtleiter-Ausgang 0 LWL-Buchse 1 : serieller Lichtleiter-Ausgang 1 Brücke Mode 0: unbenutzt Brücke Mode 1: unbenutzt TP Word 0 : Triggersignal für Start einer seriellen Ausgabe 0 TP Bit 0 : Triggersignal für Bits einer seriellen Ausgabe 0 TP Word 1 : Triggersignal für Start einer seriellen Ausgabe 1 TP Bit 1 : Triggersignal für Bits einer seriellen Ausgabe 1
Vorige: Bedienelemente (PSO32), Nach oben: PSO32 Firmware [Inhalt]
Mit der PSO32 Firmware belegt die PSO14-Karte zwei Registeradressen des Address-Decoders mit doppelter Funktion:
Register 0 : Statusabfrage Kanal 0 / Kommando Ausgabe Register 1 : Statusabfrage Kanal 1 / Daten Ausgabe
Statusabfrage:
Beim Adressieren des Registers antwortet der zugeordnete
Kanal nur mit einem Address-Accepted (AddAcc) wenn er nicht busy ist.
Dieses Signal kann über den Routing-Status abgefragt werden:
Eingabe ((Routing Status & 0x0008) != 0) -> Kanal busy
Diese Statusabfrage ist nur bei Verwendung einer neuen Address-Decoder-Karte (EW 3/04) möglich da die alten (EW 21-88) ebenfalls dieses Bit bedienen (Siehe Address-Decoder.). Auf den alten gegebenenfalls die 16c-Verbindung zum VG-Stecker auftrennen. Für Interface-Karten, die AddAcc nicht bedienen führt dies aber zu einer Fehlermeldung falls die Software AddAcc abprüft!
Kommando Ausgabe:
unteres Nippel -> Kanal 0, oberes Nippel -> Kanal 1 Bit wenn gesetzt: 0/4 1 -> nächste 16 Bit Datenausgabe auf low-Register 1/5 1 -> nächste 16 Bit Datenausgabe auf high-Register 2/6 0/1 -> 16/32 Bit Mode 3/7 1 -> Start des Kanals 0/1 z.B. 0xAD -> Start Kanal 0, Mode32, nächstes Laden: low-Register Start Kanal 1, Mode16, nächstes Laden: high-Register
Daten Ausgabe:
Die 16 Daten-Bits werden gemäß der Kommando-Bits
in den Datenregistern gespeichert. Die Daten bleiben auch nach einer
seriellen Übertragung erhalten.
Nächste: Probleme und Loesungen (PSO14), Vorige: PSO32 Firmware, Nach oben: Serielle Ausgabe (PSO14) [Inhalt]
Die Leistung der LWL-Sender SFH756V muss an die Leitungslänge und die Empfindlichkeit der Empfänger SFH551V angepasst werden. Bisher wurden die Sender nahezu mit voller Leistung betrieben, was bei kurzen Leitungen (<2m) zu Übersteuerung der Empänger führt. Rechnungen mit Hilfe der Datenblätter und Application Notes und Tests zeigen, dass statt des bisher verwendeten Vorwiderstands von 82 Ohm eher 330 Ohm geeignet sind um bei Zimmertemperatur Leitungslängen von 1.5 m bis 20 m sicher abzudecken. Bei Tests mit den AD5541CR DAC-Boards waren die Grenzen ca. 82 Ohm bei 1.20 m und 2.5 kOhm bei 10 m.
Bezug: 1mW -> 0db
Rechnung für max Leitungslänge (sicherer Betrieb nach Application Notes)
Fiber length [m] 30,00 20,00 10,00 5,00
Detector power (min=-17db, max=-6db) [db] -17,00 -17,00 -17,00 -17,00
Fiber attenuation (0.22db/m) [db] 6,60 4,40 2,20 1,10
Additional fiber attanuation (0.5db/m) [db] 1,50 1,50 1,50 1,50
Aging of fiber and known link disadvantages [db] 1,00 1,00 1,00 1,00
Aging of transmitter and receiver [db] 2,00 2,00 2,00 2,00
Range of emitter power due to temperature [db] 3,00 3,00 3,00 3,00
Min emitter power (max 0db) [db] -2,90 -5,10 -7,30 -8,40
LED current [mA] 26,68 16,54 10,25 8,07
Resistor at 3V [kOhm] 0,112 0,181 0,29 0,372
Rechnung für min Leitungslänge ohne Übersteuerung des Empfängers
Fiber length [m] 3,00 2,00 1,50 1,00
Detector power (min=-17db, max=-6db) [db] -6,00 -6,00 -6,00 -6,00
Fiber attenuation (0.22db/m) [db] 0,66 0,44 0,33 0,22
Additional fiber attanuation (0.5db/m) [db] 1,50 1,00 0,75 0,50
Aging of fiber and known link disadvantages [db] 0,00 0,00 0,00 0,00
Aging of transmitter and receiver [db] 0,00 0,00 0,00 0,00
Range of emitter power due to temperature [db] 0,00 0,00 0,00 0,00
Angstfaktor [db] -3,00 -3,00 -3,00 -3,00
Max emitter power (max 0db) [db] -6,84 -7,56 -7,92 -8,28
LED current [mA] 11,33 9,69 8,96 8,29
Resistor at 3V [kOhm] 0,265 0,310 0,335 0,362
Rechnung für max Leitungslänge (sicherer Betrieb bei Zimmertemperatur)
Fiber length [m] 30,00 20,00 10,00 5,00
Detector power (min=-17db, max=-6db) [db] -17,00 -17,00 -17,00 -17,00
Fiber attenuation (0.22db/m) [db] 6,60 4,40 2,20 1,10
Additional fiber attanuation (0.5db/m) [db] 1,50 1,50 1,50 1,50
Aging of fiber and known link disadvantages [db] 1,00 1,00 1,00 1,00
Aging of transmitter and receiver [db] 2,00 2,00 2,00 2,00
Range of emitter power due to temperature [db] 0,00 0,00 0,00 0,00
Min emitter power (max 0db) [db] -5,90 -8,10 -10,30 -11,40
LED current [mA] 13,90 8,62 5,34 4,21
Resistor at 3V [kOhm] 0,216 0,348 0,562 0,713
Vorige: LWL-Planung (PSO14), Nach oben: Serielle Ausgabe (PSO14) [Inhalt]
Störungen beim Abschalten der PSO-Karte
Im Testbetrieb zeigte sich, dass beim
Abschalten des Überrahmens die PSO-Karte für einige ms
periodische Signale sendet, die auf den DAC-Karten zu
Zufallswerten führen. Eine genauere Untersuchung ergab,
dass offenbar der 74LS245 als Treiber für die LWL-Sender
diese Oszillationen erzeugt.
Wegen dieser Oszillationen beim Abschalten war die neue PSO-Karte zum Betrieb von Hofmann-DACs (Mode = old), obwohl dafür geplant, nicht geeignet. Deshalb wurde der LS245 probehalber ersetzt durch ein Piggy-Board mit BC556 Transistoren:
LS245 IN --> BC556-Basis LS245 OUT --> BC556-Emitter LS245 VCC --> BC556-Collector
Diese Schaltung vermeidet die Oszillationen, hat aber flachere Flanken als ein LS245. Mit den neuen DAC-Boards ist das kein Problem. Aber die DAC-Karten in der Spannungsregelung von W. Arnold haben eine heftige, periodische Störung, die bei den LWL-Empfängern zu Einbrüchen in den Flanken und damit zu Übertragungsfehlern führt.
Die verschiedenen 245 Typen zeigen unterschiedliches Verhalten beim Abschalten:
Fairchild, Motorola Typen: Typ Oszillationen Pause Nachleuchten LS245 120 kHz / 1.5 ms 8 ms 4 ms ALS245 2-3 MHz / 200 us -- 4 ms HC245 70 kHz / 2.3 ms -- 23 ms HCT245 70 kHz / 3 ms -- 20 ms Hingegen keine Oszillationen bei Texas Instrument Typen: LS245, LS645, ALS245
Alle PSO-Karten sind jetzt mit SN74ALS245AN bestückt.
Die Oszillationen beim Abschalten waren der Anlass, das
Übertragungs-Protokoll völlig zu überarbeiten.
Nachdem zunächst versucht wurde, auch im Mode = new möglichst
das Hofmann-Protokoll zu verwenden, hat es nun mit dem ursprünglichen
Hofmann-Protokoll keine Verwandschaft mehr:
Zuerst wird ein 15 Bit langes festes Muster (101010101010101) als Header
gesendet, auf das sich die DAC-Karte synchronisiert. Dann folgen nahtlos
die 16/32 Daten-Bits. Damit konnten die Oszillationen beim Abschalten
sehr sicher erkannt werden da die Bit-Frequenz (2.5Mhz, 400ns) sich
wesentlich von der Störung unterscheidet. Eine vollständige 16 Bit
Übertragung braucht ca. 13us und ist damit ca. vier mal schneller
als das Hofmann-Protokoll.
Danach zeigte sich, dass die PSO-Karte beim Abschalten noch zum Senden
eines regulären Datenwortes angeregt wird mit der Info 0xffff, was
bei den DACs zu 10V Ausgang führt.
Mit der PSO2Vx Firmware konnte dies nur dadurch verhindert werden, dass
die PSO-Karte 0xffff niemals senden darf. Der letzte 0.15mV Schritt kann
also nicht eingestellt werden.
Mit der PSO32 Firmware wird dies verhindert durch das Pruefen des MSB
auf 0 im Kommando.
Nächste: Serielle Eingabe, Vorige: Serielle Ausgabe (PSO14), Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe, Funktion | ||
| • Bedienelemente | ||
| • Programmierung | ||
| • Asynchrones, serielles Protokoll von G. Hoffmann |
Nächste: Bedienelemente (PSO), Nach oben: Serielle Ausgabe [Inhalt]
Diese Parallel-Seriell-Wandlerkarte wurde von G. Hoffmann entworfen. Sie wird bei verschiedenen Experimenten zur Steuerung eingesetzt: z. B. e-Kanonen-Netzgeräte, Messbereichs-Einstellungen usw..
Ein 16 Bit Datenwort wird seriell gewandelt und auf 50 Ohm Koax-Leitung ausgegeben. Die serielle Ausgabe wiederholt sich beständig. Sie wird abgebrochen und neu gestartet, wenn ein neues 16 Bit Datenwort ausgegeben wird. Dies schein aber nicht bei allen Karten reibungslos zu funktionieren (s.u.). Die Karten können, dem Problem angepasst, mit zwei unterschiedlichen internen Takten betrieben werden (32.768kHz, 2.4576MHz) und die Bits invertiert oder nicht invertiert senden.
Von der Parallel-Seriell-Wandlerkarte existieren zur Zeit mehrere unterschiedliche Layouts (Schaltungsunterlagen im 017-Ordner):
Layout 0 (20/88):
???
Layout 1 (26/88):
modifiziertes Layout 0, davon gibt es möglicherweise nur ein Exemplar;
interner Takt fest, nur mit einem Quarz bestückt;
Lötbrücken zum Umpolen der Ausgänge.
Layout 2 (26/88):
verbessertes Layout 1, häufiger im Einsatz;
interner Takt fest, nur mit einem Quarz bestückt;
manche Exemplare machen Probleme (s.h. 017-Ordner),
wenn die Ausgabe eines Datenwortes schneller erfolgt als die Dauer
des seriellen Signals (4.395ms bei 32.768kHz), sie senden
überwiegend Schrott;
Lötbrücken zum Umpolen der Ausgänge.
Layout 3 (29.08.94; 13/96):
neues Layout;
zwei Quarze für 32.768kHz und 2.4576MHz interne Takte,
wählbar über Steckbrücke;
Steckbrücke zum Umpolen der Ausgänge.
Die Serielle Ausgabe belegt eine Registeradresse des Address-Decoders (Siehe Address-Decoder.).
Nächste: Programmierung (PSO), Vorige: Funktion (PSO), Nach oben: Serielle Ausgabe [Inhalt]
Layout 0: ???
Layout 1: LED "Write" : Anzeige einer Schreiboperation BNC-Buchsen : serielles Ausgangssignal, nicht kurzschlussfest 2 Brücken : Polarität des Ausgangssignals
Layout 2: LED "Write" : Anzeige einer Schreiboperation BNC-Buchsen : serielles Ausgangssignal, nicht kurzschlussfest 2 Brücken : Polarität des Ausgangssignals
Layout 3: LED "Busy" : Anzeige einer Schreiboperation LED "2MHz" : Anzeige 2.4576MHz Betrieb LED "32kHz" : Anzeige 32.768kHz Betrieb LED "Q" : Ausgangssignal normal LED "Q\" : Ausgangssignal invertiert BNC-Buchsen : serielles Ausgangssignal, nicht kurzschlussfest Brücke "Q/Q\" : Polarität des Ausgangssignals Brücke "2.4576MHz/32.768kHz": Taktwahl
Nächste: Protokoll (PSO), Vorige: Bedienelemente (PSO), Nach oben: Serielle Ausgabe [Inhalt]
Register 0 out: auszugebendes Datenwort (16 Bits)
Vorige: Programmierung (PSO), Nach oben: Serielle Ausgabe [Inhalt]
Nächste: Parallele Ausgabe, Vorige: Serielle Ausgabe, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe, Funktion | ||
| • Bedienelemente | ||
| • Programmierung |
Nächste: Bedienelemente (SPI), Nach oben: Serielle Eingabe [Inhalt]
Diese Seriell-Parallel-Wandlerkarte wurde von G. Hoffmann entworfen. Sie wird bei verschiedenen Experimenten zur Statuseingabe eingesetzt: z. B. Messbereichs-Einstellungen der Ionenstrom-Konverter usw..
Ein seriell über 50 Ohm Koax-Leitung eingegebenes Signal wird parallel in ein 16 Bit Datenwort gewandelt. Die Karten können, dem Problem angepasst, mit zwei unterschiedlichen internen Takten betrieben werden (32.768kHz, 2.4576MHz). Dazu muss der Quarz ausgetauscht werden.
Von der Seriell-Parallel-Wandlerkarte existieren zur Zeit mehrere unterschiedliche Layouts (11/88, 19/88, 3/89).
Nächste: Programmierung (SPI), Vorige: Funktion (SPI), Nach oben: Serielle Eingabe [Inhalt]
Layout 3/89:
LED "Read" : Anzeige einer Leseoperation
BNC-Buchse : serielles Eingangssignal
(TTL, G. Hoffmann Protokoll, 50 Ohm Abschluss)
Vorige: Bedienelemente (SPI), Nach oben: Serielle Eingabe [Inhalt]
Register 0 in: Eingabe des Datenwort (16 Bits)
Nächste: Messintervall Timer, Vorige: Serielle Eingabe, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe, Funktion | ||
| • Bedienelemente | ||
| • Programmierung |
Nächste: Bedienelemente (PPO), Nach oben: Parallele Ausgabe [Inhalt]
Diese Karte für Parallele Ausgabe wurde von G. Hoffmann entworfen. Sie wird bei Scan-Experimenten in den Labors 017 und SI zur Ausgabe der aktuellen Kanalnummer eingesetzt.
Ein 16 Bit Datenwort wird parallel auf einen 20-poligen Flachbandstecker ausgegeben. Für diese Karte gibt es kein eigenes Layout sondern es wird ein modifiziertes 26/88-Layout des Parallel-Seriell-Wandlers verwendet (handverdrahtet). Ein Redesign wäre gelegentlich angebracht.
Die Parallele Ausgabe belegt eine Registeradresse des Address-Decoders (Siehe Address-Decoder.).
Nächste: Programmierung (PPO), Vorige: Funktion (PPO), Nach oben: Parallele Ausgabe [Inhalt]
LED "Write" : Anzeige einer Schreiboperation
20-pol. Flachbandstecker: parallele Ausgangssignale (16 Bits, TTL)
Bit Pin Bit Pin
00 17 08 04
01 15 09 06
02 13 10 08
03 11 11 10
04 09 12 12
05 07 13 14
06 05 14 16
07 03 15 18
Ground 1,2 Ground 19,20
Vorige: Bedienelemente (PPO), Nach oben: Parallele Ausgabe [Inhalt]
Register 0 out: auszugebendes Datenwort (16 Bits)
Nächste: Programmierbare Zeitbasis, Vorige: Parallele Ausgabe, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe, Funktion | ||
| • Bedienelemente | ||
| • Programmierung |
Nächste: Bedienelemente (MIT), Nach oben: Messintervall Timer [Inhalt]
Diese Timer-Karte wurde von G. Hoffmann entworfen. Sie wird bei Scan-Experimenten in den Labors 017 und SI zur Programmierung der Mess- und Pausen-Intervalle der einzelnen Scan-Schritte eingesetzt.
Zur Zeit existieren 2 handverdrahtete Karten, die noch im Einsatz sind, und einige Eagle-geroutete Karten.
Der Messintervall Timer belegt eine Registeradresse des Address-Decoders (Siehe Address-Decoder.).
Nächste: Programmierung (MIT), Vorige: Funktion (MIT), Nach oben: Messintervall Timer [Inhalt]
LED "Write" : Anzeige einer Schreiboperation LED "Intervall" : Anzeige Messintervall aktiv BNC-Buchse "Intervall" : Messintervall Ausgang, TTL, pos. Logik BNC-Buchse "Intervall\" : Messintervall Ausgang, TTL, neg. Logik BNC-Buchse "ext. Takt" : externer Takt Eingang, TTL BNC-Buchse "ext. Start" : externer Start Eingang, TTL, pos. Logik
Vorige: Bedienelemente (MIT), Nach oben: Messintervall Timer [Inhalt]
Register 0 out: Timer Datenwort (16 Bits)
Bit 15 1 = externer Takt
Bit 14 1 = nur externer Start
Bits (12..8) Exponent E = 0...31
Bits (7..0) Mantisse M = 0...255
Zeitintervall = M * 2^E * T
T (Taktperiode) = 1 us für internen Takt
Berechnung von M und E für ein Intervall mit x Takten:
( ld(x) = ld(10) * lg(x) = 1 / lg(2) * lg(x) )
E = MAX(0, INT( ld(x)) -7)
M = INT(x / 2^E) (max .8% Abweichung)
M = INT(x / 2^E + 0.5) (max .4% Abweichung)
Beispiele für internen 1 MHz Takt:
Intervall M E Datenwort
1us (1 us) 1 0 0x0001
10us (10 us) 10 0 0x000a
100us (100 us) 100 0 0x0064
1ms (1 ms) 250 2 0x02fa
10ms (9.984 ms) 156 6 0x069c
100ms (99.84 ms) 195 9 0x09c3
1s (0.999424 s) 244 12 0x0cf4
10s (10.02701 s) 153 16 0x1099
Interner/externer Start:
Bit 14 ext Start Write Intervall-Start
0 H ja ja
0 L ja nein
0 L->H -- ja
1 L -- nein
1 H -- nein
1 L->H -- ja
Nächste: Interrupt Eingabe, Vorige: Messintervall Timer, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe, Funktion | ||
| • Bedienelemente | ||
| • Programmierung |
Nächste: Bedienelemente (PZB), Nach oben: Programmierbare Zeitbasis [Inhalt]
Diese Zeitbasis-Karte wurde von G. Hoffmann entworfen. Sie wird in den Labors 017 und SI zur Registrierung der Messzeit pro Kanal eingesetzt.
Sie stellt den 2^n-fach untersetzten (n=0..15, programmierbar) internen 1 MHz Quarztakt am Ausgang zur Verfügung.
Es existieren verschiedene Layouts dieser Karte: 36/88, 2/89, 15/97
Die Programmierbare Zeitbasis belegt eine Registeradresse des Address-Decoders (Siehe Address-Decoder.).
Nächste: Programmierung (PZB), Vorige: Funktion (PZB), Nach oben: Programmierbare Zeitbasis [Inhalt]
LED "Write" : Anzeige einer Schreiboperation LEDs "8 4 2 1" : Anzeige von "n" der 2^n-Taktuntersetzung BNC-Buchse "Out" : untersetzter Zeittaktausgang, TTL
Vorige: Bedienelemente (PZB), Nach oben: Programmierbare Zeitbasis [Inhalt]
Register 0 out: Zeitbasis Datenwort (16 Bits)
Bits (3..0) n=0..15 für Untersetzung 1/2^n des 1MHz Taktes
Nächste: Programmierbare Totzeit, Vorige: Programmierbare Zeitbasis, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe, Funktion | ||
| • Bedienelemente | ||
| • Programmierung |
Nächste: Bedienelemente (ITR), Nach oben: Interrupt Eingabe [Inhalt]
Diese Karte wurde von G. Hoffmann entworfen. Sie wird in den Labors 017 und SI bei den Scan-Experimenten zur Synchronisierung des Experimentablaufs durch Interrupt eingesetzt.
Das Experiment startet die Karte mit dem Startimpuls (Start-Eingang). Gleichzeitig wird der Busy-In-Eingang mit der Summe aller relevanter Busy-Signale versorgt. Erst wenn das Summen-Busy verschwunden ist wird die Karte aktiv und gibt sowohl einen Interrupt-Wunsch an den Rechner ein, als auch ein Steuersignal (Read/Reset) an das Experiment aus.
Je nach Konfiguration (Steckbrücke J2) gibt die Karte nur einen Interrupt-Impuls an den Rechner oder sie speichert den Interrupt-Wunsch bis er durch eine Leseoperation gelöscht wird. Letztere Konfiguration wird benötigt, wenn mehrere Interrupt-Quellen existieren und durch Lesen der zugehörigen Register herausgefunden werden muss, welcher Interrupt aktiv war. Ein Interrupt steht an und wird gelöscht, wenn beim Lesen das Daten-Bit 0 gesetzt ist.
Es existieren verschiedene Layouts dieser Karte: 01.08.94, 11/97
Die Interrupt-Karte belegt eine Registeradresse des Address-Decoders (Siehe Address-Decoder.). Sie kann jedoch im IT-Puls-Modus ohne Address-Decoder betrieben werden.
Nächste: Programmierung (ITR), Vorige: Funktion (ITR), Nach oben: Interrupt Eingabe [Inhalt]
LED "Select" : Anzeige, dass die Karte adressiert ist
LED "Interrupt" : Anzeige für einen anstehenden Interrupt
LED "Busy" : Anzeige des Busy-Signals vom Experiment
BNC-Buchse "Start" : Eingabe des Startsignals, TTL, pos. Logik
BNC-Buchse "Read/Reset": Ausgabe eines Steuersignals für das Experiment,
TTL, 100ns, pos. Logik
BNC-Buchse "Busy\ in" : Eingabe des Busy-Signals vom Experiment,
TTL, neg. Logik
BNC-Buchse "Busy out" : Ausgabe des Busy-Signals vom Experiment,
TTL, pos. Logik
Steckbrücke J2/1-2 : Die IT-Karte meldet mit einem IT-Puls einen
Interrupt bei der Routing-Steuerung an. Die
IT-Karte benötigt dann keine Address-Decoder-
Karte und der IT kann nicht gelesen werden.
Steckbrücke J2/2-3 : Die IT-Anmeldung wird auf der IT-Karte
gespeichert und solange an die Routing-Steuerung
gemeldet, bis er durch einen Read auf Register 0
(Bit 0) gelesen und gelöscht wird.
Vorige: Bedienelemente (ITR), Nach oben: Interrupt Eingabe [Inhalt]
Register 0 in: Lesen und Löschen des Interrupts
Bit 0 1 = es steht ein Interrupt an
Nächste: CAN Controller, Vorige: Interrupt Eingabe, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe | ||
| • Funktion | ||
| • Bedienelemente | ||
| • Programmierung | ||
| • Messungen | ||
| • Totzeit-Rechnungen | ||
| • Anwendungen |
Nächste: Funktion (PDT), Nach oben: Programmierbare Totzeit [Inhalt]
Gelegentlich kann die exakte Totzeit einer Apparatur nicht bestimmt werden, so dass notwendige Korrekturrechnungen nicht möglich sind. In diesem Falle empfiehlt sich das Vorschalten einer gut bekannten künstlichen Totzeit, die über alle anderen Totzeiten der Apparatur dominiert, und deshalb als einzige in die Korrektur eingeht.
Manche Detektoren (z.B. Channeltrons) neigen dazu, nach einem registrierten Ereignis weitere Impulse abzugeben, durch die eine Messung erheblich verfälscht werden kann. Durch eine Totzeit können solche Nachimpulse unterdrückt werden. Dabei ist jedoch zu beachten, dass eine nicht-paralysierende Totzeit wie man sie z.B. mit einem Pulse-Strecher realisieren könnte in einem solchen Falle nicht ausreichend ist.
Beachten Sie dazu den Abschnitt »Anwendungen«.
Zur Untersuchung des Ereignisstromes auf Totzeiten, Nachimpulse usw. existiert eine Interface-Karte zum Messen der Abstandsverteilung von Impulsen, zu der es eine Anleitung in der Data-Routing-Funktionsbeschreibung gibt: HTML-Version, PDF-Version.
Nächste: Bedienelemente (PDT), Vorige: Aufgabe (PDT), Nach oben: Programmierbare Totzeit [Inhalt]
Die Totzeitkarte kann sowohl über das Control-Routing als auch manuell (Jumper) programmiert werden in Schritten der Taktperiode. Für die zur Zeit zur Verfügung stehenden Logikbausteine sind Takte bis zu 40 MHz möglich. Standard ist 20 MHz. Es genügt nicht, den Quarzoszillator auszutauschen, der Logikbaustein muss auch umprogrammiert werden, da dieser sonst einen falschen Status meldet. Bei manueller Programmierung spielt dies keine Rolle, die Software würde aber u.U. eine falsche Totzeit einstellen.
Die Totzeitkarte liefert wahlweise eine paralysierende oder nicht-paralysierende Totzeit.
Da die Totzeitkarte digital mit einem Quarztakt T arbeitet ist die Totzeit auf +-T/2 unscharf im Mittel jedoch recht genau (besser 10**-3) (Siehe Mittlere Totzeit.).
Die Totzeitkarte belegt drei Registeradressen des Address-Decoders (Siehe Address-Decoder.).
Nächste: Programmierung (PDT), Vorige: Funktion (PDT), Nach oben: Programmierbare Totzeit [Inhalt]
| LED "Select": | leuchtet, wenn eines der drei Register adressiert wird | |
| BNC-Buchse "In": | Signaleingang (TTL, pos. Logik) | |
| BNC-Buchse "Out": | Signalausgang (TTL, pos. Logik) | |
| BNC-Buchse "Lost": | Ausgang für Totzeitverluste (TTL, pos. Logik) | |
| BNC-Buchse "Deadtime": | Ausgang für Totzeitsignal (TTL, pos. Logik) | |
| manuelle Programmierung: | Siehe Programmierung. |
Nächste: Messungen (PDT), Vorige: Bedienelemente (PDT), Nach oben: Programmierbare Totzeit [Inhalt]
Control-Routing Programmierung:
(dazu muss Jumper J15 entfernt werden!)
Register 0 out: Command
out 0x4000 -> paralysierende Totzeit
out 0x0000 -> nicht-paralysierende Totzeit
Register 0 in: Status
Bit 14 1 = paralysierende Totzeit
Bits (11..4) Taktfrequenz [MHz]
Bits (3..0) Anzahl der Timer Bits (TBITS)
Register 1 out: Ausgangs-Puls-Länge
Bits (TBITS-1..0) Länge Lp in Taktperioden [T]
totale mittlere Pulslänge = (Lp + 2.5) * T
Register 2 out: Länge der Totzeit
Bits (TBITS-1..0) Länge Ld in Taktperioden [T]
totale mittlere Totzeitlänge = (Ld + 3.5) * T
Jumper Programmierung:
(x = Jumper set, - = Jumper not set)
J15 x manuelle (Jumper) Programmierung
J14 x paralysierende Totzeit
- nicht-paralysierende Totzeit
J(13..0) x Länge der Totzeit Ld in Taktperioden [T]
(z.Z. nur J(9..0) belegt!!! ISP-Chip voll)
totale mittlere Totzeit = (Ld + 3.5) * T
totale mittlere Pulslänge = (Ld/2 + 2.5) * T
Pulslänge und Totzeit sind um +-0.5 T unscharf!
(Siehe Mittlere Totzeit.)
Nächste: Totzeit-Rechnungen (PDT), Vorige: Programmierung (PDT), Nach oben: Programmierbare Totzeit [Inhalt]
Der programmierbare Mittelwert der Totzeit ist durch Signallaufzeiten fehlerbehaftet. Der genaue Wert kann mit Doppelpulsgenerator, Oszillograph und passendem Zeitnormal bestimmt werden:
Messung der tatsächlichen Totzeit mit einem Doppelpulser
(Dez. 2001)
Das Scope wurde mit dem Quarz auf dem Deadtime-Board geeicht.
10 MHz Clock
Logikbaustein : ispLSI1032E-70
Clock : 10 MHz
Doppelpulsrate: 15.3 kHz
Doppelpulsabstand (Out - In/2) / In/2
1 300ns .000
2 320ns .130
3 340ns .316
4 360ns .518
5 380ns .718
6 400ns .904
7 420ns 1.00
Fit (Origin) Werte 2 - 6 mit y = a0 + a1 * x
a) a0 = -3.0828 +- .00413
a1 = .01 fest
y = .5 => x = 358.3 +- .4
b) a0 = -2.9928 +- .03141
a1 = .00975 +- .00009
y = .5 => x = 358.3
Totzeit= n * T + 3.5 * T + 8.3ns; T = 100ns; n = prog. Zeit
20 MHz Clock
Logikbaustein : ispLSI1032E-70
Clock : 20 MHz
Doppelpulsrate: 15.3 kHz
(unter 200ns löste der In-Zähler (U/D-Zähler) die Doppelpulse
nur noch teilweise auf, weshalb diese Werte zu hoch ausfallen müssen!)
Doppelpulsabstand (Out - In/2) / In/2
1 150ns .000
2 160ns .045
3 170ns .166
4 180ns .341
5 190ns .572
6 200ns .805
7 210ns 1.00
Fit (Origin) Werte 2 - 6 mit y = a0 + a1 * x
a) a0 = -3.2142 +- .01798
a1 = .02 fest
y = .5 => x = 185.7 +- .9
b) a0 = -3.081 +- .25353
a1 = .01926 +- .0014
y = .5 => x = 185.9
Fit (Origin) Werte 2 - 6 mit y = a0 + a1 * x + a2 * x**2
a) a0 = 3.359 +- 1.08274
a1 = -.05274 +- .01209
a2 = .0002 +- .00003
y = .5 => x = 187.4
Totzeit= n * T + 3.5 * T + 10.7ns; T = 50ns; n = prog. Zeit
Nächste: Anwendungen (PDT), Vorige: Messungen (PDT), Nach oben: Programmierbare Totzeit [Inhalt]
siehe auch Zählratenstatistik:
http://www.strz.uni-giessen.de/ExpHelp/statistik/statistik.html
http://www.strz.uni-giessen.de/ExpHelp/statistik/statistik.pdf
| • Mittlere Totzeit | ||
| • Korrekturformeln für nicht-paralysierende Totzeit | ||
| • Korrekturformeln für paralysierende Totzeit |
Nächste: Nicht-paralysierende Totzeit (PDT), Nach oben: Totzeit-Rechnungen (PDT) [Inhalt]
Da die Totzeitkarte digital mit einem Quarztakt T arbeitet ist die Totzeit auf +-T/2 unscharf. Der Mittelwert liegt etwa bei 0.5T und ist Zählraten abhängig, da eine vorausgehende Totzeit immer mit einem Clock-Tick endet und der Abstand zweier aufeinanderfolgender Pulse eine R * exp(-Rt) -Verteilung hat.
Rechnung für das erste Intervall nach einer Totzeit:
Zeit: t
Clock-Periode: T
Ereignisrate: R
Abstandsverteilung: D(t) = R * exp(-Rt)
Totzeitmittel:
M = Int[0-T]((T - t) * D(t))dt / Int[0-T](D(t))dt
Int[0-T](T * D(t))dt = T * (1 - exp(-RT))
Int[0-T](-t * D(t))dt = -T / RT * (1 - (RT + 1) * exp(-RT))
Int[0-T](D(t))dt = 1 - exp(-RT)
M = T * {1 - [1 - (RT + 1) * exp(-RT)] / [RT * (1 - exp(-RT)]}
RT -> 0: M -> 1/2 * T
RT -> unendl.: M -> 1 * T
RT << 1.0: M ~ (.5 + R*T/12) * T
FM = (M - .5*T)/.5*T = R*T/6
RT = .01: M = .500833 * T
RT = .1: M = .50833 * T
RT = 1.0: M = .5820 * T
Die Korrekturen sind vernachlässigbar;
z.B. 10MHz Clock; 1MHz Rate: 0.8ns Abweichung.
Da die Abstandsverteilung der Pulse eine exp(-Rt) - Verteilung ist, errechnet sich für M bei Eintreffen des nächstfolgenden Pulses in eine der nachfolgenden Clock-Perioden n der gleiche Wert:
D'(t) = R * exp(-R(t+nT)) = D(t) * exp(-RnT) M = Int[0-T]((T - t) * D(t))dt / Int[0-T](D(t))dt
Anm. zur Abstandsverteilung von zufälligen (Poisson-verteilten)
Ereignissen:
Man erhält sie als negative Änderung der Wahrscheinlichkeit, dass
von 0 bis t kein Ereignis eintrifft: ???
D(t) = -d(exp(-Rt) / dt = R * exp(-Rt)
Nächste: Paralysierende Totzeit (PDT), Vorige: Mittlere Totzeit (PDT), Nach oben: Totzeit-Rechnungen (PDT) [Inhalt]
Die Totzeit-Korrekturformeln für konstante, nicht-paralysierende Totzeit sind:
Zeit: t
Clock-Periode: T
In-Rate: R
Out-Rate: r
Totzeitverluste: v
Totzeit: Z
v = r * R * Z
R = r + v = r / (1 - r*Z)
r = R / (1 + R*Z)
Für die unscharfe Totzeit, wie sie die Totzeitkarte liefert, ist eine Mittelung über die auftretenden Totzeiten nötig. Es werden gleichverteilte Totzeiten angenommen:
r' = int[Z1,Z2](r)dZ / int[Z1,Z2]dZ
int[Z1,Z2](r)dZ = ln(1 + R*Z2) - ln(1 + R*Z1)
int[Z1,Z2]dZ = T
r' = 1/T * ln[(1 + R*Z2)/(1 + R*Z1)] (Z1 = Z-T/2; Z2 = Z+T/2)
= 1/T * ln[(1 + R*Z + R*T/2) / (1 + R*Z - R*T/2)]
= 1/T * ln[(1 + R*T/2/(1 + R*Z)) / (1 - R*T/2/(1 + R*Z))]
= 1/T * [ln(1 + r*T/2) - ln(1 - r*T/2)]
rT << 1: r' ~ r * (1 + (r*T)**2 /12)
Fr'= |(r'-r)/r| = (r*T)**2 /12 = (R*T/(1 + R*Z))**2 /12
rT -> 0: r' -> r
R' = (exp(r*T) - 1) / [(Z + T/2) - (Z - T/2)*exp(r*T)]
= (1 - exp(-r*T)) / ((Z + T/2)*exp(-r*T) - (Z - T/2))
rT << 1: R' ~ R/(1 - (r*T)**2 /12)
FR'= |(R'-R)/R| = (r*T)**2 /12 = (R*T/(1 + R*Z))**2 /12
rT -> 0: R' -> R
Die Korrekturen sind vernachlässigbar klein;
z.B. 10MHz Clock; Rate R=1MHz; Totzeit Z=1us: Fr’ = FR’ = .02%
Vorige: Nicht-paralysierende Totzeit (PDT), Nach oben: Totzeit-Rechnungen (PDT) [Inhalt]
Die Totzeit-Korrekturformeln für konstante, paralysierende Totzeit sind:
Zeit: t
Clock-Periode: T
In-Rate: R
Out-Rate: r
Totzeitverluste: v
Totzeit: Z
alle mit kürzerem Abstand als Z gehen verloren
v = R * Int[0,Z](R*exp(-R*Z))
= R * (1 - exp(-R*Z))
r = R - v = R * exp(-R*Z)
R = Umkehrung nur numerisch lösbar und doppeldeutig!
numerische Lösung mit Newton Näherung für R*T < .99:
R = r * (1 + r*Z); /* first approximation */
for(i=0; i<10; i++) {
f = R * exp(-R*Z) - r;
d = exp(-R*Z) * (1 - R*Z);
R = R - f / d; /* Newton */
}
Für die unscharfe Totzeit, wie sie die Totzeitkarte liefert, ist eine Mittelung über die auftretenden Totzeiten nötig. Es werden gleichverteilte Totzeiten angenommen:
v' = int[Z1,Z2](v)dZ / int[Z1,Z2]dZ
int[Z1,Z2](v)dZ = R*(Z2-Z1) + exp(-Z2*R) - exp(-Z1*R)
int[Z1,Z2]dZ = T (Z1 = Z-T/2; Z2 = Z+T/2)
v' = R*[1- 1/(R*T) * exp(-R*Z) * (exp(R*T/2) - exp(-R*T/2))]
r' = R - v' = R * exp(-R*Z) / (R*T) * (exp(R*T/2) - exp(-R*T/2))
= r / (R*T) * (exp(R*T/2) - exp(-R*T/2))
Fr'= |(r'-r)/r| =
= 1/(R*T) * (exp(R*T/2) - exp(-R*T/2)) - 1
RT << 1: Fr' ~ (R*T)**2 /24
Die Korrekturen sind vernachlässigbar klein;
z.B. 10MHz Clock; Rate R=1MHz; Totzeit Z=1us: Fr’ = .04%
R' = Umkehrung nur numerisch lösbar und doppeldeutig!
numerische Lösung mit Newton Näherung für R*T < .99:
R = r * (1 + r*Z); /* first approximation */
for(i=0; i<10; i++) {
f = 1/T * exp(-R*Z) *(exp(R*T/2.) - exp(-R*T/2.)) - r;
d = exp(-R*Z) * (-Z/T*(exp(R*T/2.) - exp(-R*T/2.))
+ 1/2.*(exp(R*T/2.) + exp(-R*T/2.)));
R = R - f / d; /* Newton */
}
Vorige: Totzeit-Rechnungen (PDT), Nach oben: Programmierbare Totzeit [Inhalt]
| • Dominierende Totzeit | ||
| • Beseitigen von Nachimpulsen | ||
| • Beseitigen von Nachimpulsen |
Nächste: Beseitigen von Nachimpulsen, Nach oben: Anwendungen (PDT) [Inhalt]
Gelegentlich sind Totzeiverluste nicht berechenbar da z.B. die Totzeit nicht bekannt oder veränderlich ist. In einem solchen Fall kann mit der "Programmierbaren Totzeit" eine Totzeit erzeugt werden, die die vorausgehenden, unbekannten Totzeiten dominiert.
Hier soll untersucht werden, inwiefern eine dominierende Totzeit geeignet ist, unbekannte Totzeiten so zu überdecken, dass Totzeitkorrekturrechnungen möglich werden.
Wie die folgenden Überlegungen zeigen, kann eine solche dominierende Totzeit nur näherungsweise funktionieren. Die Rechnungen zeigen zeigen in welcher Größenordnung Abweichungen zu erwarten sind und wie man sie eventuell minimieren kann.
Wie Simulationen gezeigt haben, sind die Abweichungen für eine nicht-paralysierende dominierende Totzeit deutlich kleiner als für eine paralysierende.
Nicht-paralysierende dominierende Totzeit
Die primäre Totzeit wird ebenfalls als nicht-paralysierend
und konstant vorausgesetzt.
Für nicht-paralysierende Totzeiten ergibt sich folgendes Verhalten:
E0 E1 E2 E3 En __|____|_____|______|____ T0 __|^^^^^^^^|_____________ Td __|^^^^^^^^^^^^^^^|______ T2 _____________|^^^^^^^^|__ Te __|^^^^^^^^^^^^^^^^^^^|__
Die Totzeitverluste können daher größer sein als die dominierende Totzeit erwarten lässt. Für T0=0 oder Td=T0 ist die Totzeitverlustrechnung Td exakt.
Rechnung
R: Eingangsrate vor allen Totzeiten r: Ausgangsrate nach den Totzeiten r': Ausgangsrate bei T0 = 0 Tp: primäre Totzeit Td: dominierende Totzeit (nicht-paralysierend Vd=R*Td) Vp: zusätzliche Totzeitverluste durch Tp bei Tp < Td Vd: Totzeitverluste durch Td bei Tp = 0
E0 E1 E2 E3 En __|____|_____|______|__________ Tp __|^^^^^^^^^^^|________________ Td __|^^^^^^^^^^^^^^^|____________ Tx ______________|^^^|____________ Tp ________________|^^^^^^^^^^^|__ Ty __________________|^^^^^^^^^|__ Tx = Td - Tp Ty = Tp - Tx/2 Vy = R*Ty * R*Tx = R^2 * (Td-Tp) * (3Tp-Td)/2 für Td = Tp --> Vy = 0 für Td = 2Tp --> Vy = 1/2 * (R*Tp)^2
Paralysierende dominierende Totzeit
Für eine nicht-paralysierende primäre Totzeit und eine
paralysierende dominierende Totzeit ergibt sich folgendes Verhalten:
Durch die primären Verluste von E1 und E3 wird die effektive Totzeit Td zu kurz. Für T0->0 verschwindet dieser Verlust.
E0 E1 E2 E3 En __|____|_____|______|___________ T0 __|^^^^^^^^|____________________ Td __|^^^^^^^^^^|^^^^^^^^^^^^^^^|__ T2 _____________|^^^^^^^^|_________ Te __|^^^^^^^^^^^^^^^^^^^^^^^^^^|__
Rechnung schwierig, noch ungelöst....
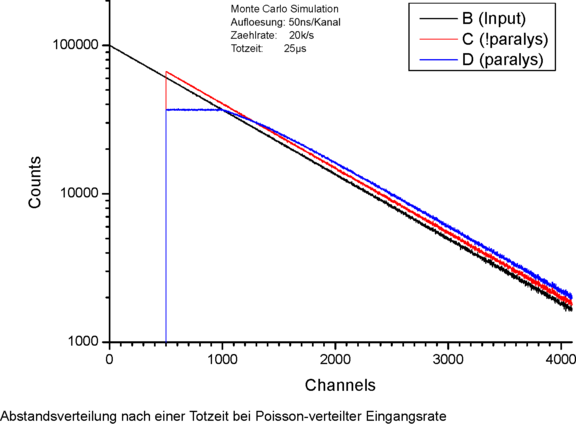
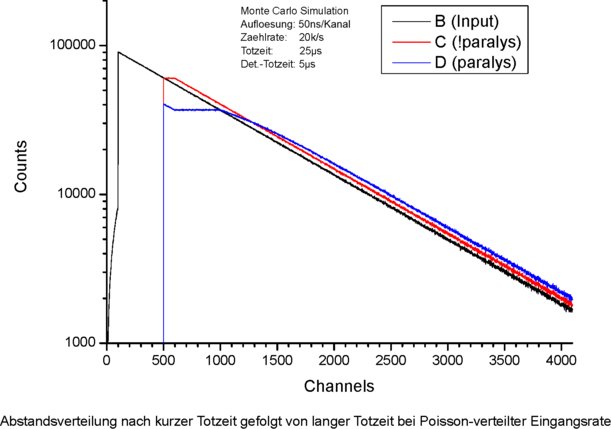
Simulationsrechnungen
Die folgenden Grafiken sind Ergebnisse von Monte-Carlo-Simulationen,
da für echte Messungen keine ausreichend gute Poisson-verteilte
Ereignisraten zur Verfügung standen. Der Versuch das Ganze mittels
Faltungsintegralen zu berechnen ist ebenfalls an der Komplexität
der Probleme gescheitert.
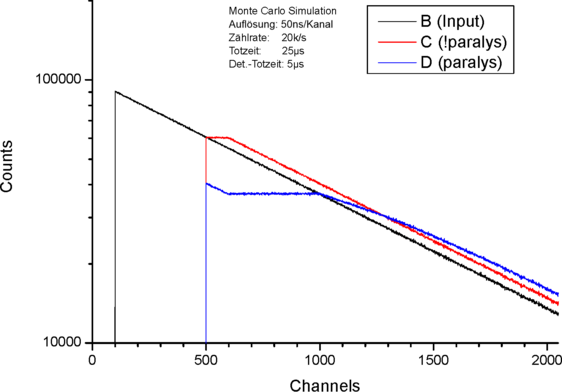
Sie zeigen die Abstandsverteilungen von Poisson-verteilten Ereignissen nach Durchlaufen von ein bzw. zwei Totzeiten. Wie man sieht haben Totzeiten einen markanten Einfluss auf die Abstandsverteilung und sind nicht nur ein Abschneiden von kurzen Abständen.
Die Abstandsverteilung von Poisson-verteilten Ereignissen ist eine abfallende Exponentialfunktion, in logarithmischer Darstellung also eine Gerade. Eine solche Verteilung lässt sich aus Zufallszahlen leicht herstellen, sodass eine Monte-Carlo-Rechnung ein bequemes Werkzeug zur Untersuchung der Auswirkungen einer Totzeit bei den verschiedenen Anwendungen ist.
wie zuvor, Ausschnitt
Nächste: Beseitigen von Nachimpulsen (PDT), Vorige: Dominierende Totzeit (PDT), Nach oben: Anwendungen (PDT) [Inhalt]
Siehe Zählratenstatisik Doku:
http://www.strz.uni-giessen.de/ExpHelp/statistik/statistik.html
http://www.strz.uni-giessen.de/ExpHelp/statistik/statistik.pdf
Wie man sich leicht überlegen kann, ist die nicht-paralysierende Totzeit nicht geeignet zum Abschneiden von z.B. Nachimpulsen eines Detektors, da nach wie vor beliebig kurze Ereignisabstände auftreten. Die paralysierende Totzeit hingegen entfernt alle Ereignisse, die zu ihrem Vorgänger einen kürzeren Abstand haben als die Totzeit.
Vorige: Beseitigen von Nachimpulsen, Nach oben: Anwendungen (PDT) [Inhalt]
Insbesondere Channeltrons haben die unschöne Eigenschaft nach einem
echten Ereignis noch Nachimpulse zu liefern, die eine
Wirkungsquerschnittmessung deutlich verfälschen können.

Totzeit (500ns) und Nachimpulse (bis ca. 4 us) eines Channeltrons
In dieser logarithmischen Darstellung der Ereignisabstände ist eine
markannte Abweichung von der zu erwartenden Geraden durch die
Poisson-verteilten Ereignisse zu erkennen. Mit einer geeigneten Totzeit
kann der Bereich der Nachimpulse ausgeblendet werden.
Wie man sich leicht überlegen kann, ist die nicht-paralysierende Totzeit
nicht dazu geeignet, da nach wie vor beliebig kurze Ereignisabstände
auftreten können.
Die paralysierende Totzeit hingegen entfernt alle Ereignisse, die zu ihrem
Vorgänger einen kürzeren Abstand haben als die Totzeit. Allerdings mit
Nebenwirkungen, s.o.
Siehe auch:
http://www.strz.uni-giessen.de/ExpHelp/datarout/datarout.html
http://www.strz.uni-giessen.de/ExpHelp/datarout/datarout.pdf
Nächste: 8-Kanal 12-Bit ADC, Vorige: Programmierbare Totzeit, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe, Funktion | ||
| • Bedienelemente | ||
| • Programmierung |
Nächste: Bedienelemente (CAN), Nach oben: CAN Controller [Inhalt]
Der CAN-Bus (Controller Area Network) wurde von Bosch entwickelt zur
Datenerfassung und Steuerung in Automobilen. Auf Grund der
außerordentlichen Fehlertoleranz des CAN-Protokolls
(Hamming Distanz = 6) sowie seiner Fähigkeit zur Selbstarbitrierung
und seiner Multi-Master-Fähigkeit
eignet er sich auch hervorragend zum Einsatz bei Experimenten und wird inzwischen gelegentlich auch dazu verwendet.
Details findet man z.B. unter:
http://www.can.bosch.com
http://www.mjschofield.com
Die CAN-Controller-Karte ist ein Interface zwischen dem Routing-Bus und dem CAN-Bus unter Verwendung des CC770 CAN-Controller-Bausteins von Bosch. Die Steuerung erfolgt über einen programierbaren ispLSI1032E Logikbaustein. Für die Initialisierungsdaten enthält die Karte einen EPROM.
Die CAN-Controller-Karte ist nicht galvanisch getrennt vom CAN-Bus, was zur Folge hat, dass alle am CAN-Bus angeschlossenen Einheiten eine solche galvanische Trennung haben sollten, falls sie nicht am gleichen 220V Netz angeschlossen sind und sich nicht räumlich dicht beieinander befinden.
Der CAN-Bus muss an beiden Enden mit 120 Ohm abgeschlossen sein. Auf der CAN-Controller-Karte kann mittels Jumper ein solcher Abschlusswiderstand aktiviert werden, was aber nur sinnvoll ist, wenn die Karte am Ende des Busses angeschlossen ist!
Nachdem die Karte mit Spannung versorgt ist, initialisieren sich zunächst die ispLSI1032E und CC770 Bausteine, danach werden die EPROM-Daten zum CC770 CAN-Controller übertragen. Das initialisieren des CC770 mit den EPROM-Daten kann auch jederzeit mit einen Init-Befehl durch die Software erfolgen. Danach kann die Software die vorausgegangene Initialisierung beliebig ändern, um eine passende Konfiguration zu erhalten. Die Initialisierung kann auch vollstd̈ig durch Software erfolgen, ein EPROM muss dann nicht vorhanden sein.
Die CAN-Controller-Karte belegt zwei Registeradressen des Address-Decoders (Siehe Address-Decoder.).
Nächste: Programmierung (CAN), Vorige: Funktion (CAN), Nach oben: CAN Controller [Inhalt]
| LED "Select": | leuchtet, wenn eines der zwei Register adressiert wird | |
| 9-pol. DSUB-Stecker: | Anschlussstecker für den CAN-Bus | |
| on Board Jumper: | Option für den CAN-Bus-Abschlusswiderstand |
Vorige: Bedienelemente (CAN), Nach oben: CAN Controller [Inhalt]
Überblick:
Register 0 out: Control/Mode/Address output
Bit 15 == 0 Control output
Bit 14 Reset command
Bit 13 Init command
Bit 15 == 1 Mode/Address output
Bits 11..08 Mode register
Bits 07..00 Address register
Register 0 in: Status input
Bit 14 Reset command activ
Bit 13 Init command activ
Bit 07 Controller busy
Bit 06 Interrupt flag
Bit 03 Error flag
Register 1 in/out: Data Register
Bits 07..00 8 bit data transfer
Bits 15..00 16 bit data transfer (project)
Mode-Register:
0 1 x--- read data write data direction of data transfer -x-- 8 bit data (16 bit data) currently only 8 bit transfers --x- fixed addr incr. addr address auto increment ---x not used not used
Address-Register:
Der CC770 CAN-Controller von Bosch hat 256 adressierbare Register,
deren Funktion in der CC770 Anleitung zu finden ist:
http://www.can.bosch.com/docu/InternetSpecification_CC770.pdf
oder InternetSpecification_CC770.pdf.
Für einen Datentransfer mit einem dieser Register des CC770 ist zuerst
das Adressregister der CAN-Controller-Karte mit der gewünschten
CC770-Registeradresse zu laden. Im Modus Address-Inkrement wird das
Adressregister nach jedem Datentransfer um eins erhöht, um fortlaufende
Daten ohne neue Adressierung lesen zu können.
Command-Register:
Status-Register:
Nächste: Standalone DAC-Boards, Vorige: CAN Controller, Nach oben: Standard-Interface-Karten [Inhalt]
| • Aufgabe, Funktion | ||
| • Bedienelemente | ||
| • Programmierung | ||
| • Analoge Bauteile |
Nächste: Bedienelemente (ADC8), Nach oben: 8-Kanal 12-Bit ADC [Inhalt]
Die 8-Kanal 12-Bit ADC-Karte wurde entwickelt um die Plattenströme der neuen Elektronenkanone in Labor 017 zu überwachen.
Kanal ADC-Board Sensor-Einschub
+ - + -
0 1 2 1 14
1 3 4 2 15
2 5 6 3 16
3 7 8 4 17
4 9 10 5 18
5 11 12 6 19
6 14 15 7 20
7 16 17 8 21
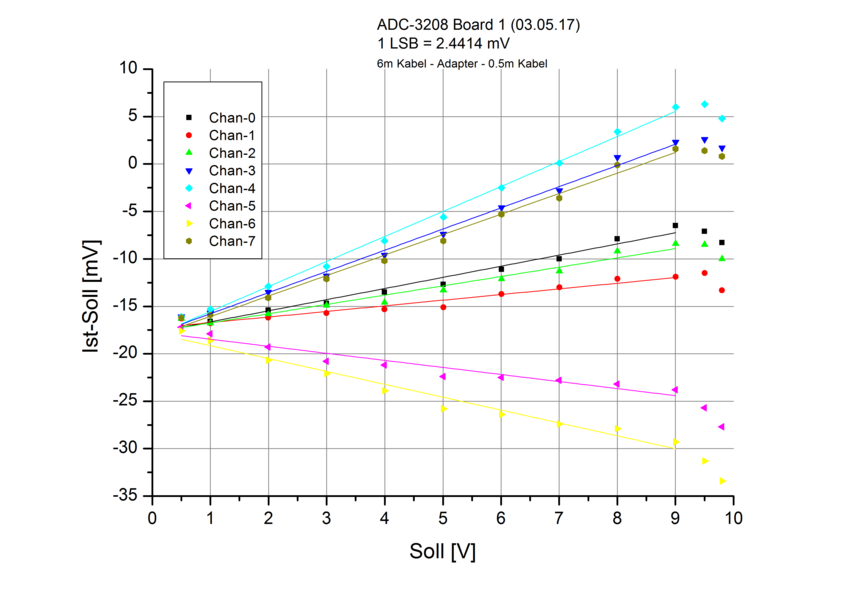
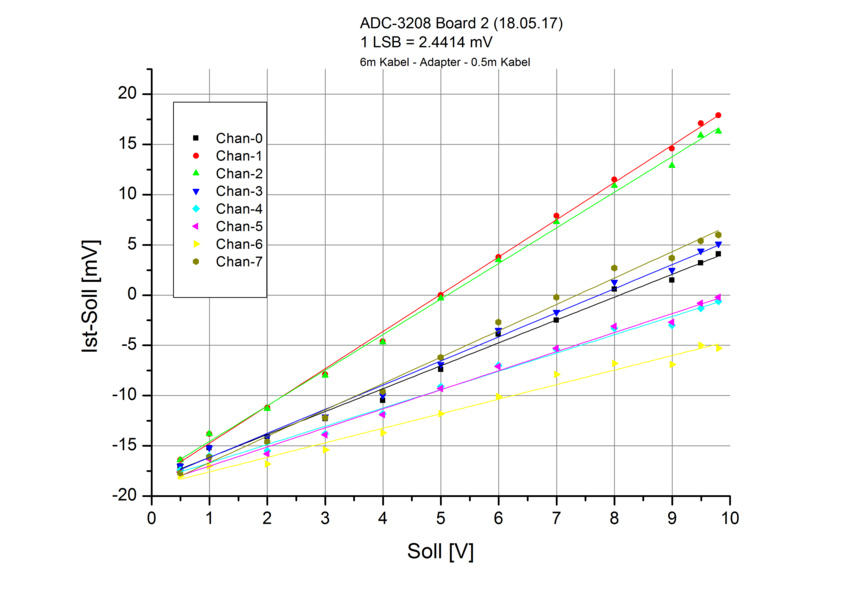
Ergebnisse eines linearen Fits von 0.5V bis 9V Sollwert für die ADC-Kanäle 0 bis 7.
Gleichung y = A + B*x [mV]
ADC-Board1 ADC-Board2
A0 -20.9 +- 0.3 -21.7 +- 0.4
B0 2.31 +- 0.05 3.15 +- 0.07
A1 -21.5 +- 0.4 -21.5 +- 0.4
B1 0.79 +- 0.08 3.66 +- 0.08
A2 -21.6 +- 0.4 -21.7 +- 0.3
B2 2.13 +- 0.07 4.56 +- 0.05
A3 -21.5 +- 0.4 -21.4 +- 0.3
B3 3.30 +- 0.07 3.37 +- 0.05
A4 -21.5 +- 0.4 -22.3 +- 0.2
B4 3.68 +- 0.07 2.83 +- 0.04
A5 -22.2 +- 0.4 -22.1 +- 0.3
B5 0.46 +- 0.08 2.78 +- 0.05
A6 -21.7 +- 0.4 -22.5 +- 0.4
B6 -0.26 +- 0.07 2.30 +- 0.07
A7 -22.2 +- 0.2 -23.5 +- 0.4
B7 3.21 +- 0.04 3.63 +- 0.07
A0 -17.81631 +- 0.36094
B0 1.17450 +- 0.06755
A1 -17.31443 +- 0.26169
B1 0.59412 +- 0.04897
A2 -17.73253 +- 0.35248
B2 0.98035 +- 0.06596
A3 -18.01110 +- 0.33027
B3 2.23223 +- 0.06181
A4 -18.16802 +- 0.30115
B4 2.63357 +- 0.05636
A5 -17.72569 +- 0.41256
B5 -0.74348 +- 0.07721
A6 -17.79580 +- 0.4471
B6 -1.35637 +- 0.08367
A7 -18.22818 +- 0.37118
B7 2.15909 +- 0.06946
A0 -17.81631 +- 0.36094 -18.42244 +- 0.39507
B0 1.17450 +- 0.06755 2.27836 +- 0.06305
A1 -17.31443 +- 0.26169 -18.43301 +- 0.29590
B1 0.59412 +- 0.04897 3.70690 +- 0.04722
A2 -17.73253 +- 0.35248 -18.09811 +- 0.33390
B2 0.98035 +- 0.06596 3.54296 +- 0.05328
A3 -18.01110 +- 0.33027 -18.55780 +- 0.36544
B3 2.23223 +- 0.06181 2.40070 +- 0.05832
A4 -18.16802 +- 0.30115 -18.51179 +- 0.33983
B4 2.63357 +- 0.05636 1.82093 +- 0.05423
A5 -17.72569 +- 0.41256 -18.90742 +- 0.33075
B5 -0.74348 +- 0.07721 1.89731 +- 0.05278
A6 -17.79580 +- 0.44710 -19.03359 +- 0.36677
B6 -1.35637 +- 0.08367 1.44670 +- 0.05853
A7 -18.22818 +- 0.37118 -19.29849 +- 0.39532
B7 2.15909 +- 0.06946 2.62594 +- 0.06309
Nächste: Programmierung (ADC8), Vorige: Funktion (ADC8), Nach oben: 8-Kanal 12-Bit ADC [Inhalt]
LED "Busy " : Anzeige einer Schreiboperation TP : Testpunkt zur Ausgabe von internen Signalen des ispLSI1032E
Nächste: Bauteile (ADC8), Vorige: Bedienelemente (ADC8), Nach oben: 8-Kanal 12-Bit ADC [Inhalt]
Die MCP3208-Karte belegt eine Control-Routing-Adresse für Ein/Ausgabe (Siehe Address-Decoder.). Mit der Ausgabe der ADC-Kanalnummer startet der ADC die Konvertierung des Analogsignals des angegebenen Kanals. Die Konvertierung benötigt 19 * 600ns = 11400ns. Während dieser Zeit wird das Acknowledge-Signal (AddAcc) für die Adressierung unterdrückt und erneute ADC-Starts werden ignoriert. Eingaben während dieser Konvertierungsphase liefern ungültige Werte und haben als Kennung das höchstwertige Bit gesetzt (0x8xxx). Dies könnte neben der Abfrage des AddAcc-Signals ebenfalls zur Synchronisierung mit dem ADC genutzt werden, es hat sich jedoch gezeigt, dass eine solche Eingabeoperation auf der Analogseite zu einer erheblichen Störung führt (ca. 30mV Schwankungen im Ergebnis). Nach der Konvertierungsphase kann das 12-bit Ergebnis beliebig oft mit einem Eingabebefehl abgerufen bzw. eine neue Konvertierung gestartet werden.
Zur Synchronisation mit dem ADC stehen zwei Statusabfragen zur Verfügung. Die Abfrage des Routing Status ist die bessere Variante da eine Dateneingabe mit Prüfung des Statusbits auf der ADC-Karte zu einer digitalen Störung führt!
Register Ausgabe: Ausgabe der Kanalnummer
Bits 15..04 0
Bits 03..00 Kanalnummer 0-7
Register Eingabe: Status/ADC-Daten Eingabe
Bit 15 == 1 ADC busy, Daten ungültig
Bit 15 == 0 ADC ready, Daten gültig
Bits 11..00 ADC Daten
Routing Status Eingabe:
(Routing Status & 0x0008) != 0 -> ADC busy, Daten ungültig
Diese Statusabfrage ist nur bei Verwendung einer neuen
Address-Decoder-Karte (EW 3/04) möglich da die alten
ebenfalls dieses Bit bedienen.
(Siehe Address-Decoder.)
Vorige: Programmierung (ADC8), Nach oben: 8-Kanal 12-Bit ADC [Inhalt]
Die acht Eingänge sind mit dem AD620B Instrumentation Amplifier bestückt:
Typ Max Nonlinearity 10 95 ppm Gain Error 0.10 0.15 % Input Offset 15 50 uV Output Offset 200 500 uV
Die Konvertierung erfolgt mit einem 12-bit, 8-Kanal ADC MCP3208B:
Typ Max Integral Nonlinearity +-0.75 +-1 LSB Diffenrential Nonlinearity +-0.5 +-1 LSB Offset Error +-1.25 +-3 LSB Gain Error +-1.25 +-5 LSB ( 1 LSB = 2.4414 mV)
Vorige: 8-Kanal 12-Bit ADC, Nach oben: Standard-Interface-Karten [Inhalt]
Die dual 16/18-Bit DAC-Karten wurde entwickelt zur Steuerung der Spannungen der verschiedenen Platten der neuen Elektronenkanone in Labor 017. Sie sind keine Control-Routing-Boards und gehören deshalb eigentlich nicht in diese Abteilung der Hardware-Beschreibungen.
Es existieren drei Varianten dieser DACs mit unterschiedlichen Eigenschaften, die sich jedoch alle bezüglich der Programmierung im Rahmen ihrer Möglichkeiten gleich verhalten. Bei den 16 Bit-DACs kommen die zwei niederwertigsten Bits nicht zur Anwendung:
Alle drei DAC-Karten besitzen ein eigenes Netzteil und benötigen nur 230V AC zu ihrem Betrieb. Die Spannungszuführung und Signalabführung erfolgen über eine Steckerleiste in den DAC-Boxen zu deren Rückseite. Die LTC-Karten haben zusätzlich einen dreipoligen Stecker zur Spannungszuführung und 2 * 2 Steckerstifte für die Signale auf dem Board als Einbauversion.
Die DAC-Karten werden über Lichtleiter angesteuert und sind deshalb für einen Betrieb auf höherem Potential geeignet. Als passender Lichtleitersender wurde das PSO14-Control-Routing-Board mit Firmware PSO32 (Siehe Serielle Ausgabe (PSO14).) entwickelt. Die Datenübertragung benötigt ca. 19us.
Die Ausgänge der DACs sind potentialfrei, deshalb ist Folgendes zu beachten:
Pin Signal 1 Out 2 Schutzerde 3 Masse
Die DAC-Karten sollten vorzugsweise ganz in der Nähe der zu steuernden Hochspannungsnetzgeräte platziert werden damit nur eine kurze Leitungslänge für die analogen Steuersignale benötigt wird.
| • Probleme und Lösungen | ||
| • DAC2752/2758-16/18-PSO32 | ||
| • DAC5541-16-pso32 |
Nächste: DAC2752/2758-16/18-PSO32, Nach oben: Standalone DAC-Boards [Inhalt]
Durchlaufverzögerung des LWL-Empfängers SFH551V
Der SFH551V ist relativ zum Bit-Takt (400ns) ziemlich lahm.
Insbesondere störend für das Timing sind die unterschiedlichen
Durchlaufverzögerungen für Licht-an und Licht-aus, die zu einer
Verkürzung des elektrischen Licht-aus Signals um bis zu max.
150ns führen, je nach Intensität des LWL-Signals und Temperatur.
Hinzu kommen noch 50ns Unschärfe durch das Einsychronisieren
auf den internen Clock-Takt (20MHz).
Das Timing kann bis auf 200ns verkürzte Bits sicher erkennen,
gemessen am Ausgang des SFH551V. Im Zweifel hilft ein längeres
LWL-Kabel.
Auf einer PSO14-Karte musste ein LWL-Sender ausgetauscht werden
da er zu hell war und den SFH551V völlig übersteuerte.
Nächste: DAC5541-16-pso32, Vorige: Probleme und Loesungen (DACx), Nach oben: Standalone DAC-Boards [Inhalt]
| • Funktion (DAC2752/2758) | ||
| • Bedienelemente (DAC2752/2758) | ||
| • Programmierung (DAC2752/2758) | ||
| • Probleme und Lösungen (DAC2752/2758) | ||
| • Anwendung bei der Elektronenkanone (DAC2752/2758) |
Nächste: Bedienelemente (DAC2752/2758), Nach oben: DAC2752/2758-16/18-PSO32 [Inhalt]
Zum Einsatz kommen sogn. Demo-Boards DC1684A mit den DACs LTC2752 (16 Bits) bzw. LTC2758 (18 Bits), die auf eine Europakarte mit Netzteil, LWL-Empfänger, Offset-/Gain-Abgleich und einem FPGA zur Steuerung montiert sind.
Nächste: Programmierung (DAC2752/2758), Vorige: Funktion (DAC2752/2758), Nach oben: DAC2752/2758-16/18-PSO32 [Inhalt]
Weitere Infos siehe: DEMO MANUAL DC1684A und LTC2752/LTC2758 Data Sheets
Manuelle Einstellung des Spannungsbereichs auf dem DC1684A-Board
Jumper MSPAN
0 programmierte Einstellung, beide DACs getrennt
1 manuelle Einstellung mittels Sn, beide DACs gemeinsam
Jumpers S2 S1 S0
0 0 0 0V to 5V
0 0 1 0V to 10V
0 1 0 -5V to 5V
0 1 1 -10V to 10V
1 0 0 -2.5V to 2.5V
1 0 1 -2.5V to 7.5V
Offset und Gain Abgleich
Mittels vier Potis können, falls nötig, Offset und Gain abgeglichen
werden wenn die zugehörigen Jumper auf EXT gesetzt sind:
Jumper Poti
Offset-A VOSADJA ?
Gain-A GEADJA ?
Offset-B VOSADJB ?
Gain-B GEADJB ?
Weitere Jumpers mit fester Einstellung
Jumper Position VREFA 5V Referenzspannungsquelle DAC-A VREFB 5V Referenzspannungsquelle DAC-B VCC REF 5V Spannungsquelle !CLR 1 Asynchrones Clear !LDAC 1 Asynchrones Load !RFLAG 1 Reset Flag Output
Anschlüsse und Testpunkte
LWL-Buchse : Lichtleiterempfänger DACA Stecker OUTA: Kanal A analoges Ausgangssignal DACA Stecker GNDA: Kanal A analoge Masse DACB Stecker OUTB: Kanal B analoges Ausgangssignal DACB Stecker GNDB: Kanal B analoge Masse TP 0 : Serielle LWL Daten TP 1 : Serielle DAC Daten TP 2 : DAC Chip Select TP 3 : DAC Clock 230 V Netzspannung an Steckerleiste VG32AC: 24 a,c Nullleiter 28 a,c 230V Leiter 32 a,c Schutzleiter 230 V Netzspannung an Stecker: ??? Nullleiter ??? 230V Leiter ??? Schutzleiter
Nächste: Probleme und Loesungen (DAC2752/2758), Vorige: Bedienelemente (DAC2752/2758), Nach oben: DAC2752/2758-16/18-PSO32 [Inhalt]
Die DAC2752/2758-Karten erhalten ihre Daten über Lichtleiter. Ein geeigneter LWL-Sender ist die PSO14-Karte mit Firmware PSO32 (Siehe Serielle Ausgabe (PSO14).).
Das Format der DAC-Daten ist das gleiche für die DAC2752- und
DAC2758-Karten. Für die DAC2752-Karten werden die beiden niederwertigsten
Bits jedoch nicht verwertet. Die Read Back Funktion der DACs wird nicht
unterstützt.
Bit-Folge, MSB zuerst:
4 Bit DAC-Kommando
0 0 1 0 Write Span DACn
0 0 1 1 Write Code DACn
0 1 0 0 Update DACn
0 1 0 1 Update all DACs
0 1 1 0 Write Span DACn, Update DACn
0 1 1 1 Write Code DACn, Update DACn
4 Bit DAC-Adresse
0 0 0 x DACA
0 0 1 x DACB
1 1 1 x all DACs
Danach folgt der DAC-Code bzw. der Span-Code, MSB zuerst:
18 Bit DAC-Code / 12 Bit don't care
6 Bit don't care / 04 Bit Span-Code
/ 8 Bit don't care
Nächste: Anwendungen (DAC2752/2758), Vorige: Programmierung (DAC2752/2758), Nach oben: DAC2752/2758-16/18-PSO32 [Inhalt]
Einschwingverhalten
Das Einschwingen erfolgt exponentiell mit folgenden Halbwertszeiten:
Bereich [V] 0 - 5 0 - 10 DAC2752 200ns 500ns DAC2758 150ns 250ns
Verhalten beim An-/Abschalten der DAC-Karten
Beim Anschalten der DAC-Karten pendelt die Ausgangsspannung, vermutlich
abhängig von dem Verhalten der Spannungsversorgung, zwischen erheblichen
positiven und negativen Werten.
Verhalten bei dem HAMEG HM8040-2 Triple Power Supply:
DAC2752 DAC2758
1ms -0.5V 1ms -2V
50ms 0->4V 0.1ms 1V
0.5ms 6V 50ms -0.5->0V
1ms 3V
Störungen durch das Schaltnetzteil
Die Messungen wurden als Differenzmessung mit zwei Tastköpfen
durchgeführt. Dabei ist das Ergebnis abhängig von der
Tastkopferdung. Bei den Messungen am Ausgang der DAC-Boxen waren die
Störungen z.B. deutlich geringer wenn beide Tastkopferdungen mit der
Schutzerde der Box verbunden waren.
Für die verbauten Morsun Schaltnetzteile wird Ripple & Noise mit max. 100mVss im Datenblatt angegeben. Tatsächlich wurde auf den Morsun-Ausgängen eine gedämpfte Hf-Störung (~2MHz, ~150mVss) im Takt der Schaltfrequenz (T~7/14us) angeregt, die auch genau so auf den DAC-Ausgängen zu beobachten war.
Mit folgenden Änderungen konnte die Hf-Störung für die DAC2752/2758 erheblich reduziert werden:
Mit diesen Maßnahmen lässt sich die Hf-Störung auf einen durch den Schaltvorgang hervorgerufenen low/high-Zacken (je 100ns) von 10mVss reduzieren. Dazwischen ca. 5mVss Restwelligkeit.
Bei Betrieb der Karte in einer der DAC-Boxen erhält man am Diodenstecker das gleiche Ergebnis. Allerdings erst nach Umlöten der falsch gepolten Netzfilter (Line - Load vertauscht). Alle Karten in der Box haben ein gemeinsames Netzfilter.
Vorige: Probleme und Loesungen (DAC2752/2758), Nach oben: DAC2752/2758-16/18-PSO32 [Inhalt]
Anschluss FUG
Getestet wurde mit dem alten, 1.5kV FUG (Plus-Pol geerdet).
!!!Achtung: mit geerdetem Minus-Pol liegen die
DAC-Anschlüsse auf Plus-HV-Potential!!!
Der Anschluss erfolgte von einer DAC-Box über 1.5m geschirmtes Kabel.
Die Schirmung war mit der Schutzerde der DAC-Box verbunden und hatte
keine Verbindung mit dem FUG.
Gemessen am FUG-Eingang treten gedämpfte Schwingungen auf:
100mVss, 10MHz
Mit 150nF oder galvanischer Verbindung zwischen Masse und Schutzerde am zur Karte gehörenden Nachbar-Ausgang der DAC-Box reduziert sich die Störung:
50mVss, 10MHz
Diese HF-Störung wirkt sich nur unwesentlich auf den FUG-Ausgang aus:
off 0 14 [V] FUG HV
10 10 10 [mVss] Rauschen
0 40 40 [mVss] HF Spitzen, weniger wenn DAC off
0 20 20 [mVss] 50Hz Brumm
Anschluss Kathodenregelung
Über die beiden DACs einer im Regeleinschub eingebauten DAC-Karte
wird der Sollwert (grob/fein) vorgegeben. Den Istwert erzeugt ein 1/400
HV-Teiler aus der FUG-Hochspannung. Ein Integralregler liefert den
Stellwert für das Kepco. Das Kepco gibt die Vorspannung für das FUG.
Durch die Regelung wird der 50Hz Brumm des alten FUG auf <10mVss reduziert. Im Takt der 50Hz Halbwellen ist jedoch für 5ms eine andauernde HF-Störung zu sehen.
Folgendes wurde untersucht um die Ursache der Störung zu finden:
Folgendes wurde zur Reduzierung der Störungen unternommen, gemessen am HV-Eingang der Regelung:
FUG: 0V, Kepco: 25V - 0V Rauschen Brumm HF Spitzen [mVss] 10 10 - 20 FUG-DAC off
FUG: 14V, Kepco: 25V - 14V Rauschen Brumm HF Spitzen [mVss] 10 10 40 50 FUG-DAC on, 10 10 <10 20 FUG-DAC on, 150nF am Nachbarausgang
50Hz-Brumm an KEPCO Ausgang:
Die DAC-Ausgänge haben je nach dem wo sie positioniert sind einen geringen
Brummanteil (<5mVss). Im Verbund mit der Kathodenspannungsregelung
(Spannungsteiler, Regelung, KEPCO) tritt jedoch zum Teil erheblicher Brumm
auf.
Alle Geräte abgeschaltet und Netzstecker von: Regelung aus ein ein ein ein ein ein KEPCO aus aus ein aus ein ein gedreht FUG aus aus aus ein ein gedreht ein Brumm [mVss] 2 2 10 5 15 30 30
Alle Geräte eingeschaltet, 1/200 Teiler:
ohne Masseverbindung zwischen den Geräten: 60mVss
mit Masseverbindung zwischen Regelung und KEPCO: 60mVss
mit Masseverbindung zwischen Regelung und FUG
und spezieller Leitungsführung: 10mVss
Alle Geräte eingeschaltet, 1/1000 Teiler:
ohne Masseverbindung zwischen den Geräten: 600mVss
mit Masseverbindung zwischen Regelung und KEPCO: 1000mVss
mit Masseverbindung zwischen Regelung, Teiler, KEPCO: 80mVss
Lässt sich durch zusätzliche Verbindung vom
Deckel der Regelung zum Teiler noch reduzieren: 30mVss
mit Masseverbindung zwischen Regelung und FUG: 200mVss
mit Masseverbindung zwischen Regelung, Teiler, FUG: 200mVss
Vorige: DAC2752/2758-16/18-PSO32, Nach oben: Standalone DAC-Boards [Inhalt]
| • Funktion (DAC5541) | ||
| • Bedienelemente (DAC5541) | ||
| • Programmierung (DAC5541) | ||
| • Probleme und Lösungen (DAC5541) |
Nächste: Bedienelemente (DAC5541), Nach oben: DAC5541-16-pso32 [Inhalt]
Testdaten der DAC-Boards, Abweichungen vom Sollwert Sollwerte 0 1 2 4 6 8 9 10 V -------------------------------------------------- DAC1/0 -1 -2 -2 -2 -2 -2 -2 -2 mV DAC1/1 -1 -2 -2 -2 -2 -2 -2 -2 mV DAC2/0 0 0 0 0 0 0 0 0 mV DAC2/1 +2 +2 +2 +2 +2 +2 +2 +2 mV DAC3/0 +2 +2 +2 +2 +2 +2 +2 +2 mV DAC3/1 0 0 0 0 0 0 0 0 mV DAC4/0 1 0 1 0 0 0 0 -1 mV DAC4/1 1 1 1 0 0 0 -1 -1 mV DAC5/0 0 -1 -1 -1 -1 -1 -1 -1 mV DAC5/1 0 0 0 0 0 0 0 0 mV
Typ Max Relative Accuracy +-0.5 +-1 LSB Diffenrential Nonlinearity +-0.5 +-1 LSB Zero Code Error +-0.3 +-0.7 LSB Gain Error +-0.5 +-2 LSB Voltage Settling Time 1 us ( 1 LSB = 0.15259 mV)
Typ Max Offset 0.5 3 mV Offset Drift 2 uV/K Output Current 15 mA
Nächste: Programmierung (DAC5541), Vorige: Funktion (DAC5541), Nach oben: DAC5541-16-pso32 [Inhalt]
Die Funktion einiger Bedienelemente hat sich im Laufe der Weiterentwicklung geändert. So war ursprünglich aus historischen Gründen für jeden Kanal eine eigene LWL-Verbindung vorgesehen, nun wird aber nur noch eine einzige benötigt, weshalb beide jetzt die gleiche Funktion haben. Ebenso haben die Testpunkte eine neue Funktion erhalten.
LWL-Buchse 0 : Lichtleiterempfänger Kanal 0 und 1 LWL-Buchse 1 : Lichtleiterempfänger Kanal 0 und 1 DAC0 Stecker OUT : Kanal 0 analoges Ausgangssignal DAC0 Stecker GNDA: Kanal 0 analoge Masse DAC1 Stecker OUT : Kanal 1 analoges Ausgangssignal DAC1 Stecker GNDA: Kanal 1 analoge Masse TP 0 word : Serielle LWL Daten TP 1 word : Serielle DAC Daten TP 0 bit : DAC Chip Select TP 1 bit : DAC Clock 230 V Netzspannung an Steckerleiste VG32AC: 24 a,c Nullleiter 28 a,c 230V Leiter 32 a,c Schutzleiter
Nächste: Probleme und Loesungen (DAC5541), Vorige: Bedienelemente (DAC5541), Nach oben: DAC5541-16-pso32 [Inhalt]
Die DAC5541-Karte erhält ihre Daten über Lichtleiter. Ein geeigneter LWL-Sender ist die PSO14-Karte mit Firmware PSO32 (Siehe Serielle Ausgabe (PSO14).).
Das Format der DAC-Daten ist das gleiche wie für die DAC2752- und DAC2758-Karten, es kann jedoch nur eine Untermenge der Kommandos ausgeführt werden:
4 Bit DAC-Kommando
nur für die Bit-Muster (0 x 1 1) erhält der DAC5541 neue Daten
4 Bit DAC-Adresse
x 0 0 x DAC0
x 0 1 x DAC1
x 1 1 x DAC0 und DAC1
18 Bit DAC-Daten, MSB zuerst
6 Bit nicht genutzt
Vorige: Programmierung (DAC5541), Nach oben: DAC5541-16-pso32 [Inhalt]
Einschwingverhalten
Laut Datenblatt sollten die DACs in ca. 2 us ihren Endwert erreichen.
Im Test zeigte sich jedoch, dass sie zunächst ca. 10% überschwingen
(auch zu negativen Werten!)
um sich dann mit einer Halbwertszeit von ca. 50us exponentiell dem
Sollwert zu nähern (Ursache unklar).
Dieses Überschwingen konnte kompensiert werden durch
1.5nF * 30KOhm = 45us in der Rückkopplung des AD820. Die Halbwertszeit
reduzierte sich damit auf ca. 25us. Nach 250us ist die Abweichung vom
Sollwert also nur noch 0.0001.
Verhalten beim An-/Abschalten der DAC-Karte
Beim Anschalten der DAC-Karte sollte der AD5541CR laut Datenblatt
einen Reset durchführen. Möglicherweise klappt dies in seltenen
Fällen nicht immer.
Beim Abschalten der DAC-Karte geht der Ausgang kurzzeitig zu negativen
Werten (ca. -5V) um nach ca. 400ms 0V zu erreichen. Mit einer Diode
am Ausgang können diese negativen Werten auf -0.6V/200ms begrenzt werden.
Eine gute Idee ist auch, dafür zu sorgen, dass die DACs immer nur
gemeinsam mit den Hochspannungsgeräten abgeschaltet werden.
Störungen durch das Schaltnetzteil
Die DAC5541-Karten werden ebenfalls durch das Schaltnetzteil stark
gestört. Gegenmaßnahmen wie bei den DAC2752/2758-Karten wurden
bisher noch nicht untersucht.
Nächste: Zaehlratenstatistik, Vorige: Standard-Interface-Karten, Nach oben: Top [Inhalt]
An dieser Stelle sind Interface-Karten verzeichnet, die nur als Einzelexemplare für ein spezielles Labor/Experiment entwickelt wurden. Details findet man möglicherweise in den Unterlagen der zugehörigen Experimente. Diese Aufstellung enthält auch Oldies, in der Hoffnung, sie eines Tages wieder recyclen zu können.
| • Schrittmotor-Interface (Labor 016) | ||
| • Probenwechsler-Steuerung (Schacht) |
Nächste: Probenwechsler-Steuerung, Nach oben: Spezielle Interface-Karten [Inhalt]
| • Aufgabe, Funktion | ||
| • Bedienelemente | ||
| • Programmierung |
Nächste: Bedienelemente (SMI), Nach oben: Schrittmotor-Interface [Inhalt]
Interface zu einer Eigenbau-Schrittmotorsteuerung, mit der ein Schlitz durch die Strahlen gefahren wird zur Strahlprofilanalyse (IIF-Messprogramm).
Mit einem Befehl können maximal 65565 Schritte in vorwärts oder rückwärts Richtung ausgeführt werden. Die Schrittgeschwindigkeit wird von der Schrittmotorsteuerung vorgegeben.
Der Schrittmotor wird angehalten bei folgenden Ereignissen:
Das Schrittmotor-Interface belegt vier Registeradressen des Address-Decoders (Siehe Address-Decoder.).
Nächste: Programmierung (SMI), Vorige: Funktion (SMI), Nach oben: Schrittmotor-Interface [Inhalt]
Das Schrittmotor-Interface enthält nur einen 7-poligen Phonostecker zum Anschluss der Schrittmotor-Steuerung:
Pin Signal 1 !Schrittmotor online (in) 2 !Alarm Obergrenze (in) 3 !Alarm Untergrenze (in) 4 Schrittmotor-Takt (in) 5 !Start Motor (out) 6 !Hochlauf (out) 7 Masse
Vorige: Bedienelemente (SMI), Nach oben: Schrittmotor-Interface [Inhalt]
Register 0: Reset-Kommando (0 Bits)
Register 1 out: Anzahl der Schrittmotorschritte (16 Bits)
im 1-Komplement:
0 -> 0xff
1 -> 0xfe
Register 2 out: Start-Kommando, Richtung (1 Bit)
Bit 0 0 = Schlitz nach unten
Bit 0 1 = Schlitz nach oben
Register 3 in: Status-Eingabe
Bit 15 1 = Schrittmotor ist online
Bit 14 1 = Schlitz am oberen Limit
Bit 13 1 = Schlitz am unteren Limit
Bit 12 1 = busy, Schrittmotor läuft
Vorige: Schrittmotor-Interface, Nach oben: Spezielle Interface-Karten [Inhalt]
!!! unvollständig, mehr im Ordner "Probenwechsler" !!!
| • Aufgabe, Funktion | ||
| • Bedienelemente | ||
| • Programmierung | ||
| • Probenwechsler Details |
Nächste: Bedienelemente (PWS), Nach oben: Probenwechsler-Steuerung [Inhalt]
Die Probenwechsler-Steuerung besteht aus zwei Control-Routing-Karten. Sie wurde entwickelt zur Steuerung des Probenwechslers von H. Schacht (s.h. Diplomarbeit H. Schacht: Ein automatisierter Gamma-Messplatz für Photonenaktivierungsanalyse (1992)).
Der Probenwechsler transportiert mit Hilfe von 4 Schrittmotoren die Proben aus einem Magazin vor den Detektor und wieder zurück. Ein weiterer Motor bedient ein Eingangstor zur Bleiburg, in der gemessen wird. Über 9 Sensoren wird der Transport und der Status des Eingangstores überwacht.
Die Probenwechsler-Steuerung belegt sechs Registeradressen des Address-Decoders (Siehe Address-Decoder.).
Es existiert nur eine handverdrahtet Version der Karten.
Nächste: Programmierung (PWS), Vorige: Funktion (PWS), Nach oben: Probenwechsler-Steuerung [Inhalt]
LED "Busy" : Anzeige Probenwechsler-Steuerung aktiv LED "Phase 1" : Anzeige Phase 1 aktiv LED "Phase 2" : Anzeige Phase 2 aktiv LED "Phase 3" : Anzeige Phase 3 aktiv
Die Probenwechsler-Steuerung enthält einen 40-poligen Flachbandstecker zum Anschluss des Probenwechslers:
Pin Signal Pin Signal 1-2 Masse 21 !Motor ready (in) 3 Sensor 1 (in) 23 Motor Error (in) 4 Sensor 2 (in) 25 !autonomer Stop (in) 5 Sensor 3 (in) 27 Motor Adress-Bit 0 (out) 6 Sensor 4 (in) 29 Motor Adress-Bit 1 (out) 7 Sensor 5 (in) 31 Motor Adress-Bit 2 (out) 8 Sensor 6 (in) 33 !Motor aktivieren (out) 9 Sensor 7 (in) 35 Motor-Drehrichtung (out) 10 Sensor 8 (in) 37 Signale ungültig (out) 11 Sensor 9 (in) 39 Schritttakt (out) 12,13..20 Masse 22,24..40 Masse
Mit jeder Modus-Ausgabe wird für ca. 200us "Signale ungültig" gesetzt, damit der Probenwechsler den Augenblick der Signalpegeländerung überbrücken kann.
Nächste: Probenwechsler Details (PWS), Vorige: Bedienelemente (PWS), Nach oben: Probenwechsler-Steuerung [Inhalt]
Register 0 out: Ausgabe Schrittzahl Phase 1 und 3
Bits 7-0 Schritte Phase 1, Beschleunigung
Bits 15-8 Schritte Phase 3, Verzögerung
Register 1 out: Ausgabe Schrittzahl Phase 2
Bits 15-0 Schritte Phase 2, Konstantlauf
Register 2 out: Ausgabe Beschleunigungswert
Bits 5-0 Beschleunigungswert N
Register 3 out: Modus-Ausgabe
Bit 2-0 Motoradresse
Bit 4 1 = Motor aktivieren
Bit 5 Motor-Drehrichtung
Register 4 out: Start-Kommando, (0 Bits)
Register 5 in: Status-Eingabe
Bit 15 0 = Motor ready
Bit 14 1 = Motor Error
Bit 13 0 = autonomer Stop
Bit 12 1 = Steuerung busy
Bit 11 1 = Störung (gelöscht durch Status-Eingabe)
Bits 8-0 Positions-Sensoren
Zusammenhänge in den Phasen 1 und 3 (Beschleunigung/Verzögerung):
Taktperiode : T = 1 us
Weg : S [steps]
Zeit : t [sec]
Geschwindigkeit : V [steps/sec]
Beschleunigung : B [steps/sec^2]
Beschleunigungswert: N (1..63)
B = N / T^2 * 15.92 * 10^-12 steps/sec^2
= N * 15.92 steps/sec^2
Wenn V und t gegeben sind errechnen sich S und N folgendermaßen:
S = V * t / 2
N = V / t * 0.0628 steps/sec^2
Phasen 1 und 3 interne Limits (T = 1us):
S = 1..255 steps (programmiert)
N = 1..63 (programmiert)
Vmin = 10.17 steps/sec
Vmax = 640.9 steps/sec
Bmin = 15.92 steps/sec^2
Bmax = 1003. steps/sec^2
V * t = 2..510 steps
Phase 2 interne Limits:
S = 1..56535 steps (programmiert)
Vorige: Programmierung (PWS), Nach oben: Probenwechsler-Steuerung [Inhalt]
Motore und Sensoren
Zur Rückmeldung eines Endanschlages und zur Normierung beim Start
hat der Probenwechsler 9 induktive Näherungschalter installiert.
Das Karussell besitzt nur einen Sensor zur Normierung. Alle Sensoren
melden High-Pegel, wenn sie ansprechen.
| Motor | Sensor (Normierung) | Sensor |
|---|---|---|
| 1 Karussell | 1 unter Teller (1-Loch) | - |
| 2 Hub | 2 unterer Sensor | 3 unter Teller (20-Loch) |
| 3 Wechsel | 4 innerer Sensor (1-Loch) | 5 Bleiburgsensor |
| 4 Transport | 6 torseitiger Sensor | 7 detektorseitiger Sensor |
| 5 Tor | 8 oberer Sensor | 9 unterer Sensor |
Schrittzahlen
Motor 5 ist ein Analogmotor, dessen Laufzeit über die Anzahl der
Schritte gesteuert wird.
Um einen Sensor wieder mit Sicherheit zu öffnen, ist eine gewisse
Anzahl von Schritten zurückzufahren. Die Probenplätze auf dem
Karussell sind 300 Schritte von einander entfernt. Was war bloß
mit dem Totpunkt???
| Motor | Anfang - Ende | Sensor öffnen | nächste Pos. |
|---|---|---|---|
| 1 Karussell | 6000 Steps/Umdr. | 20 Steps | 300 Steps/Probenplatz |
| 2 Hub | 1000 Steps/Umdr. | 40 Steps | 500 Steps/Totpunkt |
| 3 Wechsel | 3940 Steps | 20 Steps | |
| 4 Transport | ~12480 Steps | 20 Steps | |
| 5 Tor | ~3200 Steps | 20 Steps |
Empfohlene Geschwindigkeiten und Beschleunigungen
Mehr zu S und N Siehe Programmierung.
| Motor | Geschwindigkeit | Beschleunigungsdauer | S | N |
|---|---|---|---|---|
| 1 Karussell | 200 Steps/sec | 1 sec | 100 | 13 |
| 2 Hub | 500 Steps/sec | 1 sec | 250 | 31 |
| 3 Wechsel | 500 Steps/sec | 1 sec | 250 | 31 |
| 4 Transport | 500 Steps/sec | 1 sec | 250 | 31 |
| 5 Tor | 100 Steps/sec | 0.1 sec | 5 | 63 |
Nächste: Technische Details, Vorige: Spezielle Interface-Karten, Nach oben: Top [Inhalt]
Die Zählratenstatistik ist inzwischen zu einem eigenen Paper geworden.
HTML-Version:
http://www.strz.uni-giessen.de/ExpHelp/statistik/statistik.html
PDF-Version:
http://www.strz.uni-giessen.de/ExpHelp/statistik/statistik.pdf
Nächste: Oldies, Vorige: Zaehlratenstatistik, Nach oben: Top [Inhalt]
| • Routing-Bus | ||
| • Komponenten und Schnittstellen | ||
| • Schaltungsunterlagen |
Nächste: Komponenten und Schnittstellen, Nach oben: Technische Details [Inhalt]
| • Routing-Bus Signale | ||
| • Routing-Bus Abschluss |
Nächste: Routing-Bus Abschluss, Nach oben: Routing-Bus [Inhalt]
Der Routing-Bus (Siehe Abb Control-Routing-Bus.) besteht aus zwei Teilen, dem ’Allgemeinen Bus’, der über die ganze Breite des Überrahmens geht und dem ’Privat-Bus’, der erst durch das Stecken benachbarter Karten entsteht und auf diese begrenzt ist.
Allgemeiner Bus (A-Bus)
Der allgemeine Bus belegt die Anschlüsse 1a, 1c usw. bis 21c.
Die Anschlüsse mit dem Suffix a und c führen
im Gegensatz zum Privat-Bus zu verschiedenen Bus-Leitungen und
dürfen nicht gebrückt werden.
+ 5V / 10A +15V / 1A -15V / 1A
Privat-Bus (P-Bus)
Der Privat-Bus baut sich erst durch Stecken der Karten auf.
Eine fehlende Karte oder das Fehlen entsprechender Brücken auf
den Karten unterbrechen den Privat-Bus. Er reicht von den
Leitungen 22 bis 32 einschließlich. Die Leitungen mit dem
Suffix a führen zur linken Nachbarkarte und die mit c zur
rechten. Soll ein Bus aufgebaut werden, so sind die Anschlüsse
a und c einer Leitung zu brücken. Die individuelle Nutzung des
Privat-Busses ist den einzelnen Kartenbeschreibungen zu
entnehmen.
Abb.: Control-Routing-Bus a Pin c
----------------------------------------------------------
Spannungs- (digital) +5V 1 +5V (digital) Spannungs-
Versorgung (digital) 0V 2 0V (digital) Versorgung
----------------------------------------------------------
D0\ 3 D1\
D2\ 4 D3\
D4\ 5 D5\
D6\ 6 D7\
D8\ 7 D9\
D10\ 8 D11\
D12\ 9 D13\
D14\ 10 D15\
A-Bus Enable_Read 11 Reset\ A-Bus
MAddr0\ 12 1MHz-Clock
MAddr1\ 13 PAddr0\
MAddr2\ 14 PAddr1\
RAddr0\ 15 PAddr2\
RAddr1\ 16 Address_Error
RAddr2\ 17 Address_Valid
10MHz-Clock\ 18 10MHz-Clock
Data_Accepted 19 Data_Available
(analog) 0V 20 Interrupt_Request\
(analog) +15V 21 -15V (analog)
----------------------------------------------------------
22
23
24
25
P-Bus 26 P-Bus
27
28
29
30
31
32
----------------------------------------------------------
PADRx = Steckplatzadresse
MADRx = Moduladresse
RADRx = Registeradresse
(Signalnamen mit '\': aktiv low)
Vorige: Routing-Bus Signale, Nach oben: Routing-Bus [Inhalt]
Der Bus-Abschluss ist normalerweise ganz links auf der
Rückseite der ersten VG-Steckerleiste installiert. Es bestehen
jedoch auch Sonderlösungen durch von vorne gesteckte Karten,
insbesondere wenn der Überrahmen in einen Data-Routing-Bus und
einen Control-Routing-Bus aufgeteilt ist.
Der Bus-Abschluss ist je nach Aufgabe der Bus-Leitungen als
aktiver Abschluss (ca. 3V) oder durch Pulldown-Widerstände
realisiert (Siehe Abb Routing-Bus-Abschluss.).
Der 27 Ohm Widerstand, mit denen
die Pulldowns zusammengefasst sind, ist experimentell ermittelt
und verbessert die Signale ganz erheblich. Insbesondere
vermindert er ein Übersprechen, das im Data-Routing zum
Ausfall einzelner 10MHz-Takte beim Schalten der
SADR(0:3)-Leitungen geführt hatte. Warum das Ganze gerade in
dieser Beschaltung ordentlich läuft, weiß keiner so recht. Die
von den Interface-Karten erzeugten Signale können mittels
Treiber-Bausteinen mit mindestens 15mA (besser 24mA)
Low-Signalstrom (z.B. ’LS245, ’LS373, ’LS374) auf den Bus
gegeben werden.
Bei der Entwicklung von Interface-Karten bitte stets darauf
achten, dass sowohl Sender- als auch Empfänger-Bausteine
möglichst nahe am Bus platziert werden! Denn ein solcher Bus
ist eine sehr heikle Hf-Übertragungsstrecke (ca. 20MHz), die
man durch falsch aufgebaute Steckkarten empfindlich stören
kann.
Abb.: Routing-Bus-Abschluss D00\ 3a <--220Ohm--|
D01\ 3c <--220Ohm--|
D02\ 4a <--220Ohm--|
D03\ 4c <--220Ohm--|
D04\ 5a <--220Ohm--|
D05\ 5c <--220Ohm--|
D06\ 6a <--220Ohm--|
D07\ 6c <--220Ohm--| +---------+
D08\ 7a <--220Ohm--| | aktiver |
D09\ 7c <--220Ohm--+---------|Abschluss|
D10\ 8a <--220Ohm--| | 3 Volt |
D11\ 8c <--220Ohm--| +----+----+
D12\ 9a <--220Ohm--| |
D13\ 9c <--220Ohm--| ===
D14\ 10a <--220Ohm--|
D15\ 10c <--220Ohm--|
Enable_Read 11a <--220Ohm--|
Reset\ 11c <--220Ohm--|
1MHz-Clock 12c <--220Ohm--|
Addrss_Error 16c <--220Ohm--|
Interrpt_Request\ 20c <--220Ohm--|
PADR1\ 13c )
PADR2\ 14c ) Steckplatzkodierung 0V/5V
PADR3\ 15c )
MADR0\ 12a <--220Ohm--|
MADR1\ 13a <--220Ohm--| +---------+
MADR2\ 14a <--220Ohm--| |passiver |
RADR0\ 15a <--220Ohm--+---------|Abschluss|
RADR1\ 16a <--220Ohm--| | 27 Ohm |
RADR2\ 17a <--220Ohm--| +----+----+
Addr._Valid 17c <--220Ohm--| |
10MHz-Clock\ 18a <--220Ohm--| ===
10MHz-Clock 18c <--220Ohm--|
Data_Accepted 19a <--220Ohm--|
Data_Available 19c <--220Ohm--|
(analog) 0V 20a <--220Ohm--|
Nächste: Schaltungsunterlagen, Vorige: Routing-Bus, Nach oben: Technische Details [Inhalt]
Abb. Komponenten und Schnittstellen des Routing
| • Address-Decoder | ||
| • Address-Decoder <-> Routing-Steuerung | ||
| • Routing-Steuerung | ||
| • USB Rechner-Interface | ||
| • VME Rechner-Interface |
Nächste: Address-Decoder <-> Routing-Steuerung (D), Nach oben: Komponenten und Schnittstellen [Inhalt]
Zur Erleichterung des Anschlusses von Experiment-Interfaces wurde eine standardisierte Karte zur Entschlüsselung der binär verschlüsselten Modul- und Register-Adressen entwickelt. Die Address-Decoder-Karte belegt eine Steckplatz abhängige Moduladresse (3 Bits) und entschlüsselt die zugehörigen Registeradressen (3 Bits). Über den P-Bus (VG-Stecker Pins 22c - 29c; Siehe Routing-Bus.) gibt sie 8 Register-Select-Signale an rechts nachfolgende Experiment-Interfaces weiter. Ihr Einsatz kann entfallen, wenn die Experiment-Interfaces die Entschlüsselung selber vornehmen.
Sobald das Signal "Address valid" anliegt, vergleicht die Address-Decoder-Karte ihre Steckplatzadresse PADR<0-2> mit der aktuellen Moduladresse MADR<0-2>. Bei Gleichheit aktiviert sie einen 3 zu 8 Demultiplexer, der aus der codierten Registeradresse RADR<0-2> 8 einzelne Register-Select-Signale erzeugt (Siehe Aufbau des Routing.), die sie über den P-Bus (Siehe Routing-Bus.) den benachbarten Experiment-Interfaces zur Verfügung stellt.
Die über den P-Bus angeschlossenen Experiment-Interfaces nutzen die Register-Select-Signale zusammen mit den Routing-Bus-Signalen "Enable Read", "Data Accepted" und "Data Available" zur Steuerung der Ein- und Ausgabe von Daten.
Es existieren zwei Versionen der Address-Decoder-Karte, die sich in den Bedienungselementen und Anzeigen und zum Teil auch in der Funktion unterscheiden:
Bedienungselemente:
alte Version:
Schalter: Run/Stop
Run : Die Address-Decodierung ist in Betrieb
Stop: Die Address-Decodierung ist außer Betrieb und alle
Register-Select-Signale sind abgeschaltet (high).
neue Version: keine Bedienungselemente
Anzeigen:
alte Version:
LED : Select
LED leuchtet: Address-Decoder-Karte ist durch Moduladresse selektiert
LEDs: 4 2 1
Anzeige der Steckplatzadresse
LED leuchtet: Bit der angegebenen Wertigkeit ist gesetzt
neue Version:
LEDs: 0 1 2 3 4 5 6 7
Register select
LED n leuchtet: Register n ist selektiert
LEDs: 4 2 1
Anzeige der Steckplatzadresse
LED leuchtet: Bit der angegebenen Wertigkeit ist gesetzt
Funktionelle Unterschiede:
alte Version:
Ursprünglich war geplant, dass das "Address_Error"-Signal
(Routing-Bus VG-Stecker Pin 16c) von jedem Experiment-Interface
gelöscht wird, dessen Register adressiert werden. Tatsächlich
wurde jedoch auf der alten Address-Decoder-Version "Address_Error"
bereits gelöscht, wenn diese über die Moduladresse angesprochen
wurde, und die Experiment-Interfaces haben möglicherweise
das "Address_Error"-Signal nicht bedient. Damit kann jedoch
die Software nicht feststellen, ob eine benötigte
Experiment-Interface-Karte fehlt oder defekt ist. Durch
Auftrennen der Verbindung nach Pin 16c auf dem Address-Decoder
ist diese Panne zu beheben. Dann müssen gegebenenfalls
aber die Experiment-Interfaces nachgerüstet werden (s.u.).
neue Version:
Die neue Address-Decoder Version überlässt das Löschen des
"Address_Error"-Signals den Experiment-Interfaces, die dann
zum Teil
aber nachgerüstet werden müssen (teilweise bereits
geschehen), falls die Software "Address_Error" abprüft.
Nachrüstung:
Als Nachrüstung genügt eine Diode vom Eingang der
verwendeten "Register Select"-Signale zum Ausgang
des "Address_Error"-Signals, z.B.:
22c ---|<|--- 16c
Nächste: Routing-Steuerung (D), Vorige: Address-Decoder (D), Nach oben: Komponenten und Schnittstellen [Inhalt]
Nächste: USB Rechner-Interface, Vorige: Address-Decoder <-> Routing-Steuerung (D), Nach oben: Komponenten und Schnittstellen [Inhalt]
Nächste: VME Rechner-Interface, Vorige: Routing-Steuerung (D), Nach oben: Komponenten und Schnittstellen [Inhalt]
Mit dem UpGrade auf VxWorks 7 werden die MVME-Rechner nicht mehr unterstützt, es besteht jedoch die Möglichkeit für eine Rechneranpassung über USB, so dass PCs als Laborrechner zum Einsatz kommen können.
| • USB Eigenschaften | ||
| • Data-Transfer (USB) | ||
| • Event-Abhandlung (USB) | ||
| • Rechneranpassung (USB) | ||
| • Programmierung (USB) |
Nächste: Data-Transfer (USB), Nach oben: USB Rechner-Interface [Inhalt]
USB transportiert die Daten nicht Byte für Byte sondern in Paketen, die sich mit konkurrierenden Paketen die Bandbreite des USB teilen müssen. Dies führt dazu, dass die Steuerung eines Experimentes ’holprig’ werden kann. Man kennt diesen Effekt von der USB-Mouse am Bildschirm.
Als USB-Controler auf der Routing-Seite ist der FT2232H-Chip im Einsatz. Er verwendeten den Bulk-Mode (Massendaten) für den Datentransport. Für USB2 ergeben sich damit folgende Werte:
Die Daten werden in Pakete zu 512 Bytes gepackt. Maximal 15 Pakete werden in Frames zu 125us transportiert. ==> 15 * 0.5kB * 8000/s = 60MB/s
Normalerweise schaffen dies aber die beteiligten Controler schon nicht.
Der FT2232H kann laut Datenblatt im verwendeten ’Parallel FIFO Mode’ 8Mb/s
übertragen.
Die Dateneingabe des Data-Routing erreicht 4.4Mb/s wenn die Daten (4 Bytes)
vom FPGA auf dem Routing Controler Board erzeugt werden.
Um den Datendurchsatz zu optimieren hat USB den Latency-Timer, der dafür
sorgt, dass die Pakete gut gefüllt werden, indem er die Übertragung
verzögert. Für die Übertragung von einzelnen Bytes kann dies aber ziemlich
hinderlich sein für die Antwortzeiten bei der Experimentsteuerung.
Für Maus und Tastatur hat USB deshalb einen eigenen Transfer-Mode.
Der Latency-Timer des FT2232H ist programmierbar (min 10ms, default 160ms).
Eine weitere Einschränkung ergibt sich dadurch, dass USB keine Interrupts übertragen kann und diese deshalb beständig abgefragt werden müssen.
Alle diese Hindernisse müssen bei der Programmierung berücksichtigt werden, um ausreichende Antwortzeiten zu erhalten (s.h. Programm USBtst). Eine entscheidende Hilfe sind dabei die I/O-Buffer und der programmierbare Logik-Baustein (FPGA: ispLSI 1024E) auf dem Routing-Controler-Board.
Ring-Buffer im Rechner (2/Port): 128kB
Die Ring-Buffer können überlaufen.
Füllstand geprüft mit: ioctl(), usb2SerialRingBfrSize
I/O-Buffer des FT2232H (2/Port): 4kB
Die I/O-Buffer laufen nicht über, FT2232H regelt das?
Taktfrequenz des FPGA: 10MHz
Die Ring-Buffer können überlaufen. Mit ioctl() lässt sich der Buffer-Pegel abfragen:
/* Check ring buffer */ _Vx_ioctl_arg_t unread; /* Unread bytes in ring buffer */ ioctl(<file descr.>, FIONREAD, &unread); if(unread > usb2SerialRingBfrSize-1024) /* Buffer almost full */
Wenn möglich, sollte man USB-Endgeräte mit hoher I/O-Rate nicht auf dasselbe USB-Bus-System legen. PCs bieten meist mehrere davon an, was aber den Anschlüssen nicht anzusehen ist. Mit dem USBtst-Programm lässt sich die USB-Konfiguration ausgeben.
Nächste: Event-Abhandlung (USB), Vorige: USB Eigenschaften, Nach oben: USB Rechner-Interface [Inhalt]
Das Control Routing wird zur Steuerung eines Experimentes eingesetzt, indem Register geladen und gelesen werden und Interrupts behandelt werden. Im Gegensatz zu dem Flachbandkabel-Anschluss der VME-Version überträgt USB jedoch keine einzelnen Zeichen sondern Datenpakete und kennt keinen Interrupt. Auch werden die Daten nicht direkt übertragen sobald sie anstehen sondern der USB Host Controler auf der Rechnerseite pollt das Routing an, um Empfangs- bzw. Sendebereitschaft abzufragen. Weitere Aktivitäten auf dem USB-Bus können ebenfalls zu einer Verzögerung der Datenübertragung führen.
Um trotzdem eine glatte Ablaufsteuerung des Experimentes zu erreichen, wurde
folgender Weg eingeschlagen:
Die Routing-Seite ist mit einem programmierbaren Logikbaustein (FPGA)
versehen, der als Ablaufsteuerung mittels USB-Port des FT2232H (Data-Port)
übertragene Kommandos verarbeiten kann:
Lade übertragene Daten in adressiertes Register. Lese Daten aus adressiertem Register und übertrage sie. Warte auf Interrupt und übertrage eine Meldung. Warte auf Ereignis (z.B. ADC fertig) und übertrage eine Meldung.
Da rechnerseitig für Ein- und Ausgabe je ein 128kB Ring Buffer eingerichtet ist und der USB-Chip (FT2232H) je einen 4kB Puffer bereitstellt, kann vom Rechner ein umfangreicher Messzyklus als Paket (buffered I/O) für eine reaktionsschnelle Ablaufsteuerung abgeschickt werden.
Über einen zweiten USB-Port des FT2232H (Control-Port) können folgende Kommandos an die Ablaufsteuerung gegeben werden:
Statusabfrage. Start/Stop des Routing. Abbruch eines anstehenden Wait-Kommandos. Löschen eines gespeicherten Interrupts.
Mittlere Antwortzeiten:
Für das Control-Routing sind sowohl Ausgaben als auch Eingaben über USB
erforderlich. So muss z.B. jede Registerabfrage zuvor mit einer
entsprechenden Ausgabe (je 4 Bytes) angefordert werden, also ein Hin und Her
von wenigen Bytes.
Für die unterschiedlichen Verfahren bei der Programmierung haben sich für das Beschreiben und/oder Lesen eines Registers mit jeweils 4 Bytes folgende, über 100000 Wiederholungen gemittelte Antwortzeiten ergeben (s.h. Programm USBtst):
Write/Read synchron in einer Task
write/read register: 68.4 us (direct I/O)
Ausgabe: Reg.-Write-Kommando (write(), direct I/O)
Ausgabe: Reg.-Read-Kommando (write(), direct I/O)
Eingabe: Datum (read(), direct I/O)
write/read register: 44.8 us (buffered I/O)
Ausgabe: Reg.-Write-Kommando (fwrite(), buffered I/O)
Ausgabe: Reg.-Read-Kommando (fwrite(), buffered I/O)
Eingabe: Datum (read(), direct I/O)
write only register: 26.2 us (direct I/O)
Ausgabe: Reg.-Write-Kommando (write(), direct I/O)
(Rückmeldung am Ende der Verarbeitung durch den FPGA)
read only register: 43.4 us (direct I/O)
Ausgabe: Reg.-Read-Kommando (write(), direct I/O)
Eingabe: Datum (read(), direct I/O)
write only register: 1.3 us (buffered I/O)
Ausgabe: Reg.-Write-Kommando (fwrite(), buffered I/O)
(Rückmeldung am Ende der Verarbeitung durch den FPGA)
Write/Read asynchron in getrennten Tasks
write/read register: 75.4 us (direct I/O)
Ausgabe: Reg.-Write-Kommando (write(), direct I/O)
Ausgabe: Reg.-Read-Kommando (write(), direct I/O)
Eingabe: Datum (read(), direct I/O)
write/read register: 10.9 us (buffered I/O)
Ausgabe: Reg.-Write-Kommando (fwrite(), buffered I/O)\n"
Ausgabe: Reg.-Read-Kommando (fwrite(), buffered I/O)\n"
Eingabe: Datum (read(), direct I/O)\n"
read only register: 10.6 us (buffered I/O)
Ausgabe: Reg.-Read-Kommando (fwrite(), buffered I/O)\n"
Eingabe: Datum (read(), direct I/O)\n"
Wie zu erwarten, lässt sich die Antwortzeit durch Verwenden von Buffered I/O (fwrite) bei der Ausgabe deutlich verringern. Denn damit werden die Daten zunächst im Ring-Buffer angesammelt bevor sie als Paket mit fflush() an das USB übergeben werden. Mit Direct I/O hingegen werden die Kommandos an das Routing einzeln mit jedem write() abgeliefert und vom USB mehr oder weniger dicht zu Paketen verpackt.
Nächste: Rechneranpassung (USB), Vorige: Data-Transfer (USB), Nach oben: USB Rechner-Interface [Inhalt]
Der Routing-Controler kennt zwei unterschiedliche Events:
Ferner wird der Status beider Event-Leitungen bei jeder Daten-Eingabe
im Status-Byte mitgeliefert. Jedoch möglicherweise nicht aktuell
sondern zum Zeitpunkt als die Routing-Steuerung die Eingabe abgesandt
hatte.
Mittlere Antwortzeiten:
Read Status: 39.2 us
Ausgabe: Read-Status-Kommando (1 Byte, write(), direct I/O)
Eingabe: Status (2 Bytes, read(), direct I/O)
Nächste: Programmierung (USB), Vorige: Event-Abhandlung (USB), Nach oben: USB Rechner-Interface [Inhalt]
FTDI FT2232H Mini Modul
Die USB-Anbindung wird mit einem FTDI FT2232H MINI MODULE
realisiert. Es zeigt sich über USB beim PC mit 2 seriellen I/O-Ports.
VxWorks 7 hat einen brauchbaren Treiber für den FT2232H-Chip.
Aus der Auswahl von Industriestandards, die der FT2232H IC bietet, ist insbesondere der folgende wegen der großen FIFOs für die Rechneranpassung geeignet:
Asynchronous FIFO Interface Mode Dual Port FIFO TX Buffer (4 Kbytes per interface) Dual Port FIFO RX Buffer (4 Kbytes per interface)
Der FT2232H Baustein des Mini Moduls muss mit Hilfe des
FTDI-FT_PROG Windows-Programmes über USB konfiguriert werden.
Mit ’DEVICES -> Scan and Parce’ wird der Ist-Zustand des
EEPROM ausgelesen und kann editiert werden.
Und mit ’DEVICES -> Program’ wird der EEPROM programmiert.
Mit ’File -> Save As Template’ kann die Konfiguration eines
bereits programmierten FT2232H auf einen neuen übertragen werden.
Die Data-Routing Konfiguration unterscheidet sich vom Data-Routing nur in der Serial Number:
USB Device Descriptor Custom VID/PID: FTDI Default Vendor ID: 0403 Product ID: 6010 USB Version: USB 2.0 USB Config Descriptor -> bmAttributes Bus Powered: yes Self Powered: no Max Bus Power: 150 mA USB Remote Wakeup: no Pull Down IO...: no USB String Descriptors Manufacturer: FTDI Product Descr.: FT2232H Mini Modul Ser. Num. Enabled: yes Auto Gen. Ser. No: no Serial Number: IAMP-CtrlRout Ser. Num. Prefix: Hardware Spezific DPRDRV : 0 Suspend on DBus7 Low: no Port A/B -> Hardware: 245 FIFO Port A/B -> Driver: Virtual COM Port I/O Pins -> Group.. -> Slow Slew: no I/O Pins -> Group.. -> Drive: 8mA I/O Pins -> Group.. -> Schmitt..: no
Durch eine Fehlbedienung kann der EEPROM unbrauchbar werden. Dann hilft nur ein ’Disaster Recovery’. Von FTDI gibt es eine Anleitung dazu. Benötigt wird ein intaktes Mini Modul und das defekte muss vermutlich aus der Schaltung raus...
Vorige: Rechneranpassung (USB), Nach oben: USB Rechner-Interface [Inhalt]
Das Mini Modul bietet zwei Ports. Über Port-1 erfolgt die Kontrolle des Datentransfers und die Statusabfrage. Port-0 dient dem Datentransfer.
******** Control Routing Control Port Programmierung ********
Ein Kommando an den Control Port besteht aus einem Byte, in dem nur das
höchstwertige und die drei niederwertigsten Bits ausgewertet werden:
"***** Control commands"
[x,x,x,x,x,0,0,0] "Send status"
Es werden zwei Bytes zurück gesendet:
1. Header Byte: [0,1,0,0,0,0,1,1]
2. Status Byte: [Stp,ItL,ItR,Rdy,wIt,wRy,x,x]
Stp == 1: 'Stop Routing' ist gesetzt
ItL == 1: 'Interrupt-Leitung' ist gesetzt
ItR == 1: 'Interrupt-Register' ist gesetzt
Rdy == 1: 'Register-Ready-Leitung' ist gesetzt
wIt == 1: 'Wait for ItR' ist aktiv
wRy == 1: 'Wait for Rdy' ist aktiv
[Stp,x,x,x,x,0,0,1] "Clear control bits"
Stp == 1: 'Stop Routing' wird gelöscht.
[Stp,x,x,x,x,0,1,0]; "Set control bits"
Stp == 1: 'Stop Routing' wird gesetzt.
[x,x,x,x,x,0,1,1]; "Generate an event"
Mit diesem Kommando kann ein endloses Warten auf ein Ereignis (wIt, wRy)
im Data-Port beendet werden.
[x,x,x,x,x,1,0,0]; "Clear interrupt Trap Register"
Ein im Routing Controler gespeicherter Interrupt (ItR) wird gelöscht
falls keine neue Interupt-Anforderung (ItL) ansteht.
******** Control Routing Data Port Programmierung ********
* Ein Kommando an den Data Port besteht aus vier Bytes:
1. Header Byte: [0,1,1,0,0,0,1,1]
2. Command/Address Byte: [c,c,a,a,a,a,a,a]
Address [a,a,a,a,a,a]: Routing Register Adresse
Commands [c,c]:
[0,0]; "Read Data"
Die beiden Daten Bytes enthalten keine Information.
Das adressierte Register wird ausgelesen und das Datenwort
in der Rückmeldung zurück übertragen.
[0,1]; "Write Data"
Die beiden Daten Bytes werden zu dem adressierten Register
übertragen. Es erfolgt keine Rückmeldung.
[1,0]; "Wait for Event"
Mit diesem Kommando wird auf ein Routing Ereignis gewartet.
Der Ereignistyp wird im High Byte angegeben:
[0,x,x,x,x,x,x,x]; "Wait for Routing Interrupt"
[1,x,x,x,x,x,x,x]; "Wait for Routing Board Ready"
Wenn das Ereignis eintrifft erfolgt eine Rückmeldung. Da die
Data Bytes unverändert rückübertragen werden, können die
x-Bits zur Synchronisierung der Software bei mehreren Event
Kommandos in einem Paket verwendet werden.
Solange ein Warten aktiv ist, werden keine weiteren Kommandos
bearbeitet. Das Warten kann über ein Software generiertes
Ereignis durch ein Control Command abgebrochen werden (s.o.).
[1,1]; "Echo data"
Die beiden Daten Bytes werden mit dem Status des adressierten
Registers zurück übertragen.
3. Data High Byte:
4. Data Low Byte:
Bei jeder Ausgabe eines Kommandos werden die beiden Data Bytes in
das Datenregister übernommen und je nach Typ des Kommandos
verändert oder unverändert bei der Rückmeldung wieder zurück
übertragen.
* Eine Rückmeldung des Data Ports besteht aus vier Bytes:
1. Header Byte: [0,1,1,0,0,0,1,1]
2. Status Byte: [ITR,!RDY,x,x,x,x,x,x]
ITR == 1: Ein Routing Interrupt Request steht an.
!RDY == 1: Das adressierte Register meldet 'Not Ready' oder fehlt.
3. Data High Byte:
4. Data Low Byte:
Als Data Bytes wird der vom Kommando abhägige Inhalt des
Datenregisters übertragen.
Vorige: USB Rechner-Interface, Nach oben: Komponenten und Schnittstellen [Inhalt]
| • Programmierung (VME) | ||
| • Data Transfer Protokoll (VME) |
Nächste: Data Transfer Protokoll (VME), Nach oben: VME Rechner-Interface [Inhalt]
Programmierung des Rechner-Interfaces
*** Address decoding:
A2 A1 Read Write
0 0 Status IP-Control Transfer ohne Wait States
0 1 ---- IT-Vektor Transfer ohne Wait States
1 0 Data Data Transfer mit Wait States
1 1 ---- Rout-Contl Transfer mit Wait States
*** Bit IP-Board Control word:
15 cReset Reset
14 cItEnab Enable Interrupts
13 cDatTest IP-board data test loop on
12 cItRep Repeat Interrupt
11-00 0 not used
*** Bit Status word:
15 cReset Reset on
14 cItEnab Interrupts enabled
13 cDatTest IP-board data test loop on
12 0 not used
11 0 not used
10 0 not used
09 0 not used
08 sOnline Routing online
07 sError global error flag
06 sItErr IT enabled but IT vector not set
05 sBreak Routing online break down detector
04 sTimeout Data transfer timeout
03 sAdInv Modul address invalid
02 sItReq Interrupt reqüst from Routing
01 sItvOK Interrupt vector set
00 0 not used
*** Bit Routing-Board Control word:
15 0 not used
14 (cNoItTrap) Projekt: no trapping of Interrupt pulses
13 cDatTest Rout.-board data test loop on
12-07 0 not used
06-04 MAddr02-00 Rout.-Bus modul address
02-00 RAddr02-00 Rout.-Bus register address
Vorige: Programmierung (VME), Nach oben: VME Rechner-Interface [Inhalt]
(huber@ionix:~/servix/vme/IspLSI/cntlrout/vmeCntlRout)
Geschwindigkeitstest mit Programm "vmetst" (1000000 Transfers):
Data Write/Read
IP board write/read : 5.3us/Data für MVME162
Routing board write/read : 7.4us/Data für MVME162, 40m
Routing board write/read : 6.9us/Data für MVME162, 5m
Test board write/read : 7.4us/Data für MVME162, 40m
Test board write/read : 7.0us/Data für MVME162, 5m
Test board read only : 6.0us/Data für MVME162, 40m
Test board read only : 5.7us/Data für MVME162, 5m
Data Write/Read -> Interrupts
IT handler only : 11.3us/IT für MVME162, 5m
IT + Signal handler : 140.us/IT für MVME162, 5m
IP-Board:
Data Transfer Master
Sender, Receiver
8 Mhz Clock
Routing Board:
Data Transfer Slave
Receiver, Sender
10 Mhz Clock
Data Transfer Protokoll (neue Variante 11.05.98)
******* Data from Routing:
Der Receiver (Master) zeigt mit RdReq an, dass er zur Datenaufnahme bereit ist.
Der Sender (Slave) antwortet mit der Übertragung von Daten.
Es werden 2 * 8 Bits übertragen mit RdRdy einmal zu Beginn. RdRdy und erstes
Daten-Byte gehen gleichzeitig auf die Leitung, dabei kann RdRdy gestört werden.
Durch eine solche Störung kann sich das Erkennen von RdRdy jedoch nur maximal
für die Dauer der Störung (ca. 20ns?) verzögern. Nach RdReq wartet der
Receiver max. 8 * 125ns = 1000ns auf die RdRdy-Antwort des Senders. Das begrenzt
die max. Kabellänge auf ca. 50m.
Timing: Data from Routing (Routing-Board)
2. Data-Byte verlängert wegen Reserven zum Ende hin!
20ns __0246802468024680246802468024680246802468024680246802468024680246802468024680
ns 100 200 300 400 500 600 700 800 900 000 100 200 300 400 500
RdRdy __/^^^^^^^^^\________________________________________________________________
Data __/^^^^^^^^^^^^^^X^^^^^^^^^^^^^^^^^^^\_______________________________________
20ns __0246802468024680246802468024680246802468024680246802468024680246802468024680
ns 100 200 300 400 500 600 700 800 900 000 100 200 300 400 500
Timing: Data from Routing (Routing-Board)
10ns __01234567890123456789012345678901234567890123456789012345678901234567890123456789
ns 100 200 300 400 500 600 700
RdReq __/^^^^^^^^^^^^^^^^^^^^^^^^\______________________________________________________
RdRS1 __/#########/^^^^^^^^^^^^^^\#########\____________________________________________
RdRS2 __/#########/^^^^^^^^^^^^^^\#########\____________________________________________
RdRSyn _______/####/^^^^^^^^^^^^^^^^^^^\####\____________________________________________
RdData ____________/####/^^^^^^^^^^^^^^\####\____________________________________________
LdData ______________________/####/^^^^\####\____________________________________________
RdRdy ______________________/####/^^^^^^^^^^^^^^\####\__________________________________
Data ______________________/####/^^^^^^^^^^^^^^^^^^^^^^^^XXXXXX^^^^^^^^^^^^^^^^^^^^^^^^
10ns __01234567890123456789012345678901234567890123456789012345678901234567890123456789
ns 100 200 300 400 500 600 700
Timing: Data from Routing (IP-Board)
10ns __01234567890123456789012345678901234567890123456789012345678901234567890123456789
ns 100 200 300 400 500 600 700
RdRdy __/^^^^^^^^^^^^^^^^^^^\___________________________________________________________
Data __/^^^^^^^^^^^^^^^^^^^^^^^^^^^^^X^^^^^^^^^^^^^^^^^^^^^^^^^^^^^\___________________
RdRS1 __/###########/^^^^^^^\###########\_______________________________________________
RdRS2 __/###########/^^^^^^^\###########\_______________________________________________
RdRSyn ________/#####/^^^^^^^^^^^^^\#####\_______________________________________________
LoadDL ______________/#####/^^^^^^\#####\________________________________________________
LoadDH ____________________________________________________/#####/^^^^^^\#####\__________
LdClk ______________||||||________________________________||||||________________________
Data __/^^^^^^^^^^^^^^^^^^^^^^^^^^^^^X^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^\_________
10ns __01234567890123456789012345678901234567890123456789012345678901234567890123456789
ns 100 200 300 400 500 600 700
******* Data to Routing:
Der Sender (Master) zeigt mit WrRdy an, dass er Daten sendet.
Der Receiver (Slave) synchronisiert sich zum Empfang der Daten ein.
Es werden 2 * 8 Bits übertragen mit WrRdy einmal zu Beginn. WrRdy und erstes
Daten-Byte gehen gleichzeitig auf die Leitung, dabei kann WrRdy gestört werden.
Durch eine solche Störung kann sich das Erkennen von WrRdy jedoch nur maximal
für die Dauer der Störung (ca. 20ns?) verzögern.
Timing: Data to Routing (IP-Board) 2. Data-Byte verlängert wegen Reserven zum Ende hin! 10ns __01234567890123456789012345678901234567890123456789012345678901234567890123456789 ns 100 200 300 400 500 600 700 WrRdy __/^^^^^^^^^^^^^^^^^^^^^^^^\________________________________________________ Data __/^^^^^^^^^^^^^^^^^^^^^^^^X^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^\________________ 10ns __01234567890123456789012345678901234567890123456789012345678901234567890123456789 ns 100 200 300 400 500 600 700 Timing: Data to Routing (Routing-Board) 10ns __01234567890123456789012345678901234567890123456789012345678901234567890123456789 ns 100 200 300 400 500 600 700 WrRdy __/^^^^^^^^^^^^^^^^^^^^^^^^\______________________________________________________ Data __/^^^^^^^^^^^^^^^^^^^^^^^^X^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^\________________ WrRS1 __/#########/^^^^^^^^^^^^^^\#########\____________________________________________ WrRS2 __/#########/^^^^^^^^^^^^^^\#########\____________________________________________ WrRSyn _______/####/^^^^^^^^^^^^^^^^^^^\####\____________________________________________ LoadDL ___________/####/^^^^\####\______________________________________________________ LoadDH _________________________________________/####/^^^^\####\________________________ LdClk ____________|||||_________________________|||||___________________________________ Data __/^^^^^^^^^^^^^^^^^^^^^^^^X^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^\________________ 10ns __01234567890123456789012345678901234567890123456789012345678901234567890123456789 ns 100 200 300 400 500 600 700
Vorige: Komponenten und Schnittstellen, Nach oben: Technische Details [Inhalt]
| • Board Interface-Steuerung | ||
| • Board Routing-Steuerung | ||
| • Board Rechneranpassung | ||
| • Board Rechner-Interface |
Nächste: Board Routing-Steuerung, Nach oben: Schaltungsunterlagen [Inhalt]
Nächste: Board Rechneranpassung, Vorige: Board Interface-Steuerung, Nach oben: Schaltungsunterlagen [Inhalt]
Nächste: Board Rechner-Interface, Vorige: Board Routing-Steuerung, Nach oben: Schaltungsunterlagen [Inhalt]
Vorige: Board Rechneranpassung, Nach oben: Schaltungsunterlagen [Inhalt]
Vorige: Technische Details, Nach oben: Top [Inhalt]
| • Alte Routing-Steuerung | ||
| • Alte Rechneranpassungen |
Nächste: Alte Rechneranpassungen, Nach oben: Oldies [Inhalt]
Diese Variante der Routing-Steuerung war an TR86-, PDP11- und VME-Systemen im Einsatz. Sie ist inzwischen durch eine Karte mit einem hochintegrierten, programmierbaren Baustein und verbesserter Funktionalität ersetzt worden.
| • Funktion | ||
| • Bedienungselemente, Anzeigen | ||
| • Schnittstellen | ||
| • Routing-Bus |
Nächste: Bedienungselemente (RSTo), Nach oben: Alte Routing-Steuerung [Inhalt]
Nächste: Schnittstellen (RSTo), Vorige: Funktion (RSTo), Nach oben: Alte Routing-Steuerung [Inhalt]
Nächste: Routing-Bus (RSTo), Vorige: Bedienungselemente (RSTo), Nach oben: Alte Routing-Steuerung [Inhalt]
Vorige: Schnittstellen (RSTo), Nach oben: Alte Routing-Steuerung [Inhalt]
Vorige: Alte Routing-Steuerung, Nach oben: Oldies [Inhalt]
| • PDP11 - DRV11-J - Anpassung |
Nach oben: Alte Rechneranpassungen [Inhalt]
| • Adressausgabe und Statuseingabe | ||
| • Interrupt-Eingabe | ||
| • Programm-Beispiele | ||
| • Block- und Timing-Diagramme |
Nächste: Interrupt-Eingabe, Nach oben: PDP11 - DRV11-J - Anpassung [Inhalt]
Zur Adressausgabe wird zunächst Port C der DRV11-J auf Ausgabe
programmiert (falls er nicht bereits auf Ausgabe steht) und
anschließend die Modul- und Registeradresse und ggf. das
Reset-Bit ausgegeben. Die Ausgabe wird in der
Routing-Steuerung gespeichert und bleibt gültig bis zur
nächsten Ausgabe.
Zur Statuseingabe wird zunächst Port C auf Eingabe
programmiert (falls er nicht bereits auf Eingabe steht) und
anschließend das Statuswort eingegeben.
Aufbau von Adress- und Statuswort
Bit Adressausgabe Statuseingabe
0 RADR0\ Online
1 RADR1\ Address Error
2 RADR2\ Interrupt
3 xxx 0
4 MADR0\ 0
5 MADR1\ 0
6 MADR2\ 0
7 xxx 0
8 Reset-Bit xxx
9-15 xxx xxx
RADR<0-2>\ 3 Registeradress-Bits (invertiert)
MADR<0-2>\ 3 Moduladress-Bits (invertiert)
Reset-Bit Programmierung eines Reset des DRV11-Routing.
Die Experiment-Interfaces können dieses Reset
benutzen, müssen aber nicht.
Online Das DRV11-Routing ist angeschaltet.
Address Error Die angesprochene Moduladresse existiert nicht,
oder die Adress-Decodierung bedient diese Leitung
nicht.
Interrupt Request\ Zustand der Interrupt Request Leitung (invertiert).
0: ein angemeldeter Interrupt ist noch nicht
bearbeitet.
xxx unbenutztes bzw. undefiniertes Bit
Nächste: Programm-Beispiele, Vorige: Adressausgabe und Statuseingabe, Nach oben: PDP11 - DRV11-J - Anpassung [Inhalt]
Zur Anmeldung eines Interrupt-Wunsches (Exp.-IT) wird von dem betroffenen Experiment-Interface die Interrupt Request (IR-) Leitung auf low gezogen. Mit dem high/low-Übergang wird über die DRV11-J Karte (USER RPLY C, IMR-Bit 6) bei der PDP11 eine Programmunterbrechung angemeldet. Falls nicht gerade eine Programmunterbrechung mit gleicher oder höherer Priorität aktiv ist, wird die zugehörige Interrupt-Service-Routine (ISR), falls vorhanden, aktiviert, um den Interrupt abzuhandeln. Wenn die IR-Leitung auf low gehalten wird, kann die IT-Anmeldung über eine Routing-Statuseingabe abgefragt werden. Dieses Polling-Verfahren ist zwar reaktionslangsamer, aber es erspart den Aufwand für eine Interrupt-Service-Routine. Da nur eine einzige IR-Leitung zur Verfügung steht, müssen beim Auftreten unterschiedlicher Exp.-ITs diese unterscheidbar gemacht werden. Dies geschieht z.B. durch Speichern der einzelnen ITs in I/O-Registern (IT-Register) (Abb. 3.2.6.6). Ist ein Exp.-IT gespeichert, so zieht er die IR-Leitung solange auf low, bis er bearbeitet ist. Der erste eintreffende Exp.-IT löst durch den high/low-Übergang auf der IR-Leitung eine Programmunterbrechung aus, d.h. die ISR wird aktiviert. Diese führt dann folgende Aufgaben aus:
Durch Statuseingabe prüft sie, ob es einen Exp.-IT zu bearbeiten gibt. Möglicherweise ist nämlich der zu dieser Programmunterbrechung gehörige Exp.-IT bereits bei dem vorherigen ISR-Durchlauf bearbeitet worden. Falls kein Exp.-IT ansteht, ist ihre Aufgabe bereits erledigt.
Falls ein Exp.-IT ansteht, beginnt die ISR alle IT-Register auszulesen bis sie einen gesetzten Exp.-IT findet. Diesen bearbeitet sie und löscht das IT-Register (bei einer Schaltung nach Abb. 3.2.6.6 ist dies bereits durch das Lesen erfolgt!).
Anschließend beginnt sie wieder mit der Prüfung, ob noch ein IT-Register gesetzt ist usw. bis alle ITs gelöscht sind.
Das Ganze funktioniert nur reibungslos, wenn die "PS<7:5>"-Priorität der ISR größer oder gleich ist der "Device Interrupt Priority" des DRV11-J Interfaces. Darauf ist unbedingt zu achten, damit es keine Überholvorgänge bei den Interrupts gibt. Varianten zu diesem Vorschlag sind ausdrücklich erlaubt! Dies ist fast alles lediglich (durch entsprechende Dokumentation untermauerte) Theorie und muss im Detail noch einmal richtig durchgeprüft werden!
Nächste: Block- und Timing-Diagramme, Vorige: Interrupt-Eingabe, Nach oben: PDP11 - DRV11-J - Anpassung [Inhalt]
Beispiel 1: Read/Write Data; Read/Clear Interrupt
Über Port C erfolgt die Adressausgabe und die Statuseingabe,
über Port D die Datenein-/ausgabe. Der in einem Register
gespeicherte Interrupt wird über die Statuseingabe abgefragt
und über einen READ auf dieses Register gelöscht. Es wird
keine Interrupt-Routine eingesetzt.
; PDP11 MACRO Program
;Device addresses of DRV11-J
DRVCSA=: 164160
DRVDBA=: 164162
DRVCSB=: 164164
DRVDBB=: 164166
DRVCSC=: 164170
DRVDBC=: 164172
DRVCSD=: 164174
DRVDBD=: 164176
DRVVEC=: 274 ;Vector address of DRV11-J
DTADDR=: 000022 ;Address ('12'H) of Data: Modul = 1, Register = 2
ITADDR=: 000064 ;Address ('34'H) of Interrupt:
;Modul = 3, Register = 4
DATA=: 123456 ;Data to be output
; System macros:
.MCALL EXIT$S
DRERR$ ;Directive error symbols
START::
; I/O of data
CLRB DRVCSA ;Reset DRV11 group 1
CLRB DRVCSC ;Reset DRV11 group 2
BISB #1,DRVCSC+1 ;Port C for output
MOV #DTADDR,R0 ;Load modul/register address
COMB R0 ;Invert address bits
MOV R0,DRVDBC ;Output of address
BICB #1,DRVCSC+1 ;Port C for input
BIT #1,DRVDBC ;Test Routing status
BEQ 99$ ;Routing offline
BIT #2,DRVDBC ;Test Routing status
BNE 99$ ;Modul not found
BISB #1,DRVCSD+1 ;Port D for output
MOV #DATA,DRVDBD ;Write data
BICB #1,DRVCSD+1 ;Port D for input
MOV DRVDBD,R0 ;Read data
; Polling for Interrupt
BICB #1,DRVCSC+1 ;Port C for input
BIT #4,DRVDBC ;Test Routing status
BNE 99$ ;No interrupt found
BISB #1,DRVCSC+1 ;Port C for output
MOV #ITADDR,R0 ;Load modul/register address
COMB R0 ;Invert address bits
MOV R0,DRVDBC ;Output of address
BICB #1,DRVCSC+1 ;Port C for input
BIT #2,DRVDBC ;Test Routing status
BNE 99$ ;Modul not found
BICB #1,DRVCSD+1 ;Port D for input
MOV DRVDBD,R0 ;Read and clear interrupt
99$: EXIT$S
.END START
Beispiel 2: Abhandlung eines Interrupts durch Interrupt-Routine
Die Interrupt-Enable/Disable-Routine und die
Interrupt-Service-Routine werden über das Page-Register 5
in den Adressraum des Betriebssystems gemapped. Diese
Programmteile müssen in "position independent code"
geschrieben werden!
; PDP11 MACRO Program
;Device addresses of DRV11-J
DRVCSA=: 164160
DRVDBA=: 164162
DRVCSB=: 164164
DRVDBB=: 164166
DRVCSC=: 164170
DRVDBC=: 164172
DRVCSD=: 164174
DRVDBD=: 164176
DRVVEC=: 274 ;Vector address of DRV11-J
ITADDR=: 000064 ;Address ('34'H) of Interrupt:
;Modul = 3, Register = 4
EFN=:10. ;Eventflag, set after interrupt
; System macros:
.MCALL CINT$S,ASTX$S,EXIT$S
.MCALL CLEF$S,SETF$S,WTSE$S
DRERR$ ;Directive error symbols
START::
;Reset DRV11J
CLRB DRVCSA ;Reset Group 1
CLRB DRVCSC ;Reset Group 2
;Test Routing
BICB #1,DRVCSC+1 ;Input on port C
BIT #1,DRVDBC ;Test Routing status
BEQ 99$ ;Routing offline
;Load DRV11-J mode bits: fixed prio, common vector,
;interrupt, polarity low
MOVB #202,DRVCSC
;Clear IMR bit 6, enable interrupt USER RPLY C
MOVB #056,DRVCSC
;Enable Auto-clear
MOVB #300,DRVCSC ;Preselect ACR for writing
MOVB #100,DRVCSD ;Set auto-clear bit 6
;Load vector address memory
MOVB #340,DRVCSC ;Preselect VAM 0 for writing
MOV #DRVVEC,R0
ASH #-2,R0
MOVB R0,DRVCSD ;Load vector address memory 0
;Set master mask bit, enable interrupts
MOVB #241,DRVCSA
MOVB #241,DRVCSC
;Connect to DRV11-J interrupt
CINT$S #DRVVEC,#P5BASE,#DRVISR,#DRVEDI,#PR4,#DRVAST
BCS 99$ ;Error
;Wait for interrupt
CLEF$S #EFN ;Clear EFN
WTSE$S #EFN ;Wait for eventflag EFN set
;Reset Routing and DRV11J
BISB #1,DRVCSC+1 ;Output on port C
MOV #400,DRVDBC ;Reset Routing
CLRB DRVCSA ;Reset DRV11J group 1
CLRB DRVCSC ;Reset DRV11J group 2
;Disconnect DRV11J interrupt
CINT$S #DRVVEC,#0,#0
BCS 99$ ;Error
99$: EXIT$S
;Executive APR5 mapped routines, AST routine
.PSECT AP5SCT ;Programm section mapped to EXEC by APR5
P5BASE:: ;Base for APR5 mapping by executive
TSKTCB: .WORD 0 ;TCB address of task
; Enable/disable DRV11-J interrupts, Exec APR5 mapped
DRVEDI:: ;Needs position independent code!
BCS 10$ ;Disconnect
MOV @#$TKTCB,TSKTCB ;Get TCB for later
BISB #2,@#DRVCSA+1 ;Enable interrupt
RETURN
10$: BICB #2,@#DRVCSA+1 ;Disable interrupt
RETURN
; DRV11-J interrupt service routine, FORK routine, Exec APR5 mapped
DRVISR:: ;Needs position independent code!
MOV R0,-(SP) ;;;Save R0
BISB #1,@#DRVCSC+1 ;;;Port C for output
MOV #ITADDR,R0 ;;;Load modul/register address
COMB R0 ;;;Invert address bits
MOV R0,@#DRVDBC ;;;Output of address
BICB #1,@#DRVCSD+1 ;;;Port D for input
MOV @#DRVDBD,R0 ;;;Read and clear interrupt
MOV (SP)+,R0 ;;;Restore R0
CALL @#$FORK2 ;;;Create system process
CLR (R3) ;Declare FORK block free
MOV #EFN,R0 ;Eventflag EFN
MOV TSKTCB,R5 ;Task control block address
CALL @#$SETF ;Set eventflag EFN, unstop task
RETURN
; AST routine, Task level
; Doing nothing but symbol DRVAST has to be defined in CINT$
DRVAST:: MOV R0,(SP) ;Save R0, overwrite vector address
ASTX$S ;Exit AST
.END START
; TKB indirect command file
;
TEST/PR:0,TEST/-SP/-SH= TEST
SY11:RSX11S.STB/SS
LB11:11SLIB/LB
/
;Global common for IO page
RESCOM=EX11:KCOM.TSK/RW:7
//
Nach oben: PDP11 - DRV11-J - Anpassung [Inhalt]
Abb. 3.2.6.2 Symbole in den Blockdiagrammen (Abb. 3.2.6.3 - 3.2.6.6)
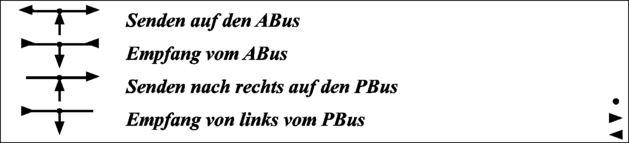
Abb. 3.2.6.3 Routing-Steuerung, Statuseingabe und Adressausgabe
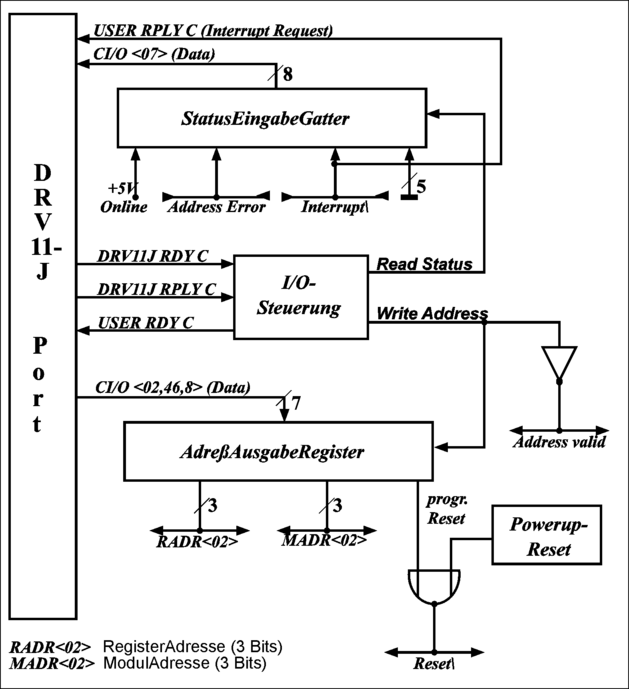
Abb. 3.2.6.4 Routing-Steuerung, Daten-Ein/Ausgabe
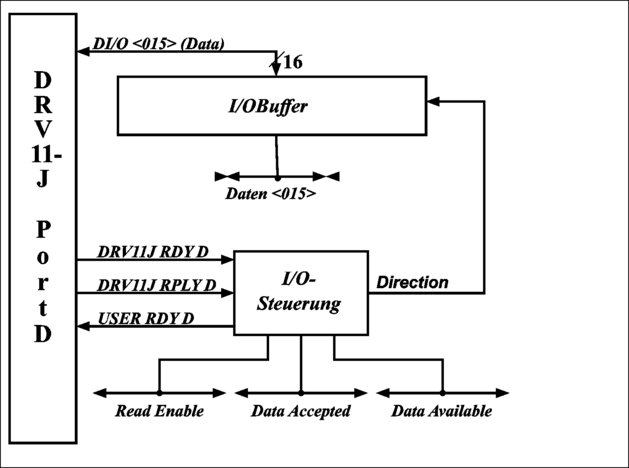
Abb. 3.2.6.5 Adress-Decodierung
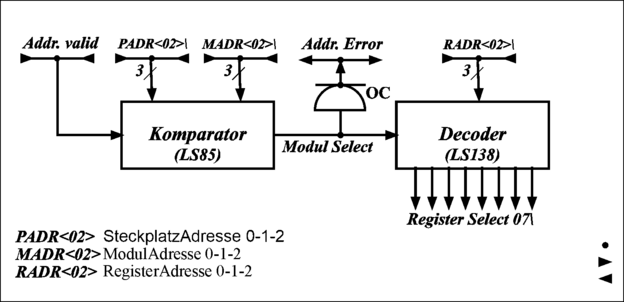
Abb. 3.2.6.6 Daten Ein-/Ausgabe und Interrupt Eingabe
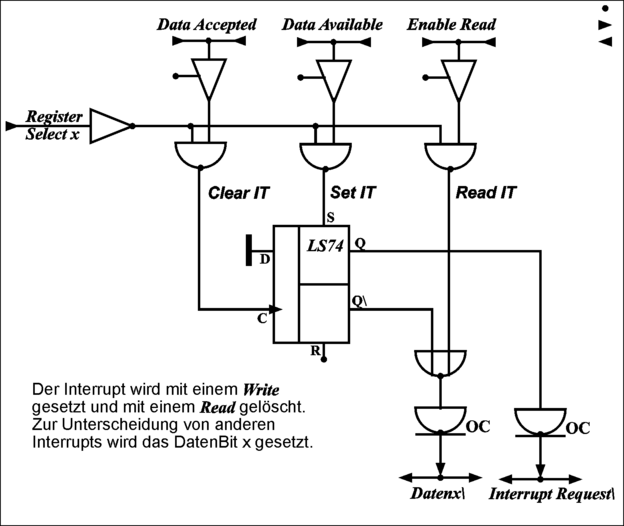
Abb. 3.2.6.7 Timing Adress-Ausgabe
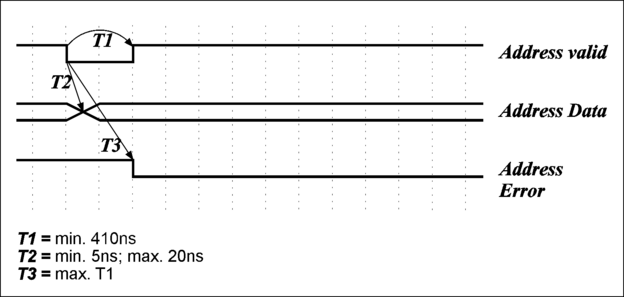
Bei der Ausgabe einer Modul-/Register-Adresse über Port C wird kurz vor der Änderung der Adressdaten das Signal Address_Valid auf low geschaltet. Es bleibt auf low bis zur Beendigung der Ausgabe (dies ist erheblich länger als notwendig, aber das macht nix!). Mit diesem Signal kann die Adressentschlüsselung des Interfaces abgeschaltet werden bis die Adressdaten stabil sind, um falsche Register-Selects zu vermeiden. Als Quittung für erkannte Adresse kann das Interface das Signal Address_Error auf low ziehen. Über eine Status-Eingabe über Port C kann die Software dieses Signal abfragen und damit feststellen, ob die angesprochene Adresse überhaupt vorhanden ist.
Abb. 3.2.6.8 Timing Dateneingabe
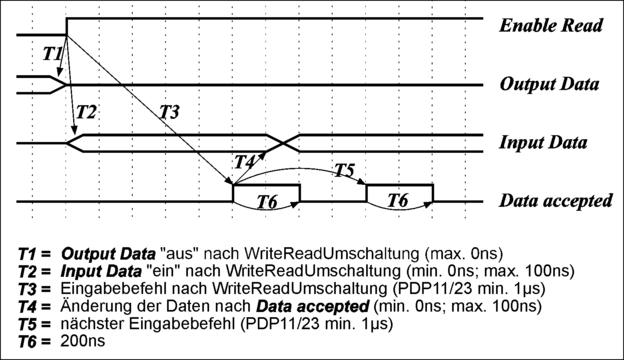
Nachdem der Port D des DRV11-J auf Eingabe programmiert wurde, nimmt die Routing-Steuerung die Ausgabedaten vom Bus und setzt das Signal Enable_Read auf high. Mit diesem Signal schaltet das Interface die Eingabe-Datengatter auf und gibt dadurch die Eingabedaten auf den Bus. Die tatsächliche Eingabe der Daten erfolgt erst mit einem nachfolgenden Eingabebefehl über Port D durch die Software, der irgendwann später erfolgen kann. Jede Eingabe wird mit dem Signal Data_Accepted quittiert. Danach können die Daten verändert und mit einer erneuten Eingabe eingelesen werden.
Abb. 3.2.6.9 Timing Datenausgabe
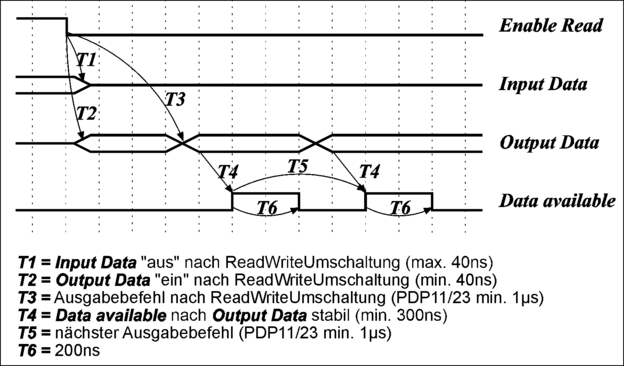
Nachdem der Port D des DRV11-J auf Ausgabe programmiert wurde, setzt die Routing-Steuerung das Signal Enable_Read auf low und schaltet die Ausgabedaten auf den Bus. Mit Enable_Read muss das Interface die Eingabedaten in angemessener Frist vom Bus nehmen. Die tatsächliche Ausgabe der Daten erfolgt erst mit einem nachfolgenden Ausgabebefehl über Port D durch die Software, der irgendwann später erfolgen kann. Jede Ausgabe wird mit dem Signal Data_Available angezeigt, für dessen Dauer die Ausgabedaten auf den I/O-Leitungen bereit stehen.
Abb. 3.2.6.10 Timing Interrupt-Eingabe
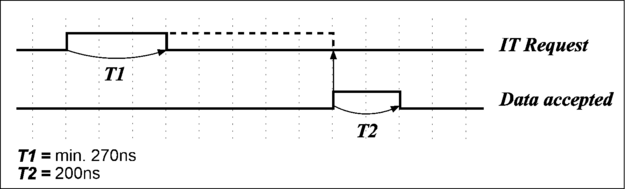
Mit der Vorderflanke des Signals Interrupt_Request wird ein Interrupt gespeichert (sofern das DRV11-J entsprechend programmiert wurde) und in der PDP11 die Interrupt-Service-Routine aktiviert ist (falls sie existiert). Solange der Interrupt_Request ansteht, kann er über die Statuseingabe mittels Port C abgefragt werden. Damit ergibt sich folgende Möglichkeit der Interrupt-Behandlung: Jedes Interface, das einen Interrupt behandeln lassen will, speichert diesen in einem eigenen Interrupt-Register, und gibt dessen Inhalt auf die Interrupt_Request Leitung ("wired or"). Dadurch wird die Interrupt-Service-Routine aktiviert, die nun beginnt alle möglichen Interrupt-Register der Reihe nach auszulesen, um die Quelle des Interruptes zu ermitteln und zu löschen. Zwischendurch kann sie über eine Statuseingabe ermitteln, ob noch weitere Interrupts anstehen. Am Ende muss sie dies auf jeden Fall tun, da ein neuer Interrupt-Request auf einen bereits bestehenden zu keiner weiteren Aktivierung der Interrupt-Routine führt. Auf die nicht ganz triviale Programmierung einer Interrupt-Service-Routine kann auch verzichtet werden, wenn periodisch mittels Statuseingabe auf anstehende Interrupt-Requests abgefragt wird (Polling).